#include <mecanum_drive.hpp>
Classes | |
| struct | ChassisDimensionConfig |
| struct | Config |
Public Types | |
| using | Imu = trap::communication::sensors::IImu |
Public Member Functions | |
| MecanumDrive (Drivers &drivers, std::unique_ptr< IQuadDrive > quadDrive, std::unique_ptr< Imu > imu, const Config &config) | |
| void | setTargetTranslation (const physics::Velocity2D &translation) override |
| void | setTargetRotation (const RPM &rotation) override |
| void | initialize () override |
| void | update () override |
| void | refresh () override |
| void | refreshSafeDisconnect () override |
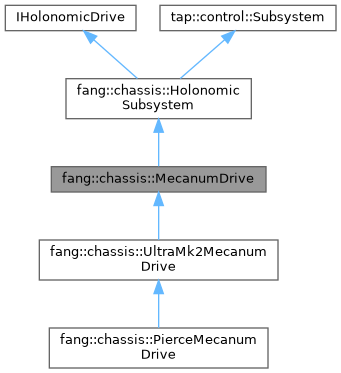
 Public Member Functions inherited from fang::chassis::HolonomicSubsystem Public Member Functions inherited from fang::chassis::HolonomicSubsystem | |
| HolonomicSubsystem (Drivers &drivers) | |
| virtual | ~HolonomicSubsystem () |
| Public Member Functions inherited from tap::control::Subsystem | |
| Subsystem (Drivers *drivers) | |
| virtual | ~Subsystem () |
| void | registerAndInitialize () |
| mockable void | setDefaultCommand (Command *defaultCommand) |
| mockable Command * | getDefaultCommand () const |
| mockable void | setTestCommand (Command *testCommand) |
| mockable Command * | getTestCommand () const |
| virtual const char * | getName () const |
| mockable int | getGlobalIdentifier () const |
Additional Inherited Members | |
| Protected Attributes inherited from tap::control::Subsystem | |
| Drivers * | drivers |
Detailed Description
Provides taproot friendly subsystem control functionality for a mecanum drive with dimensional analysis
Member Typedef Documentation
◆ Imu
Constructor & Destructor Documentation
◆ MecanumDrive()
| fang::chassis::MecanumDrive::MecanumDrive | ( | Drivers & | drivers, |
| std::unique_ptr< IQuadDrive > | quadDrive, | ||
| std::unique_ptr< Imu > | imu, | ||
| const Config & | config | ||
| ) |
- Parameters
-
quad drive- QuadDrive to be owned by Mecanum subsystem imu - imu attached to the chassis config - see config
Member Function Documentation
◆ initialize()
|
overridevirtual |
Called once when you add the Subsystem to the commandScheduler stored in the Drivers class.
Implements fang::chassis::HolonomicSubsystem.
Reimplemented in fang::chassis::PierceMecanumDrive.
◆ refresh()
|
overridevirtual |
Called regularly
Reimplemented from tap::control::Subsystem.
◆ refreshSafeDisconnect()
|
overridevirtual |
Kills functionality upon loss of remote input
Reimplemented from tap::control::Subsystem.
◆ setTargetRotation()
Set the angular velocity of the chassis. Counterclockwise is positive. This is due to ensuring consistency within mathematical convention. If you are taking the horizontal joystick position, you will likely need to multiply it by -1.
◆ setTargetTranslation()
|
override |
This is relative to the field - the axis are basically wherever the robot faces forward at the start of the round
◆ update()
|
override |
The documentation for this class was generated from the following files:
- fang-mcb-project/src/control/chassis/drive/holonomic/mecanum/mecanum_drive/mecanum_drive.hpp
- fang-mcb-project/src/control/chassis/drive/holonomic/mecanum/mecanum_drive/mecanum_drive.cpp