Loading...
Searching...
No Matches
fang::chassis::HolonomicSubsystem Class Referenceabstract
#include <holonomic_subsystem.hpp>
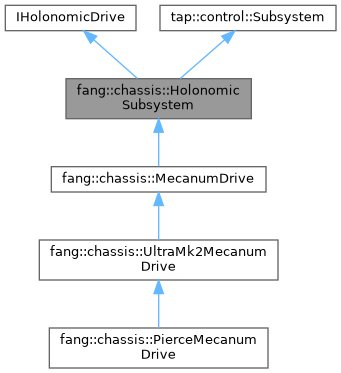
Inheritance diagram for fang::chassis::HolonomicSubsystem:
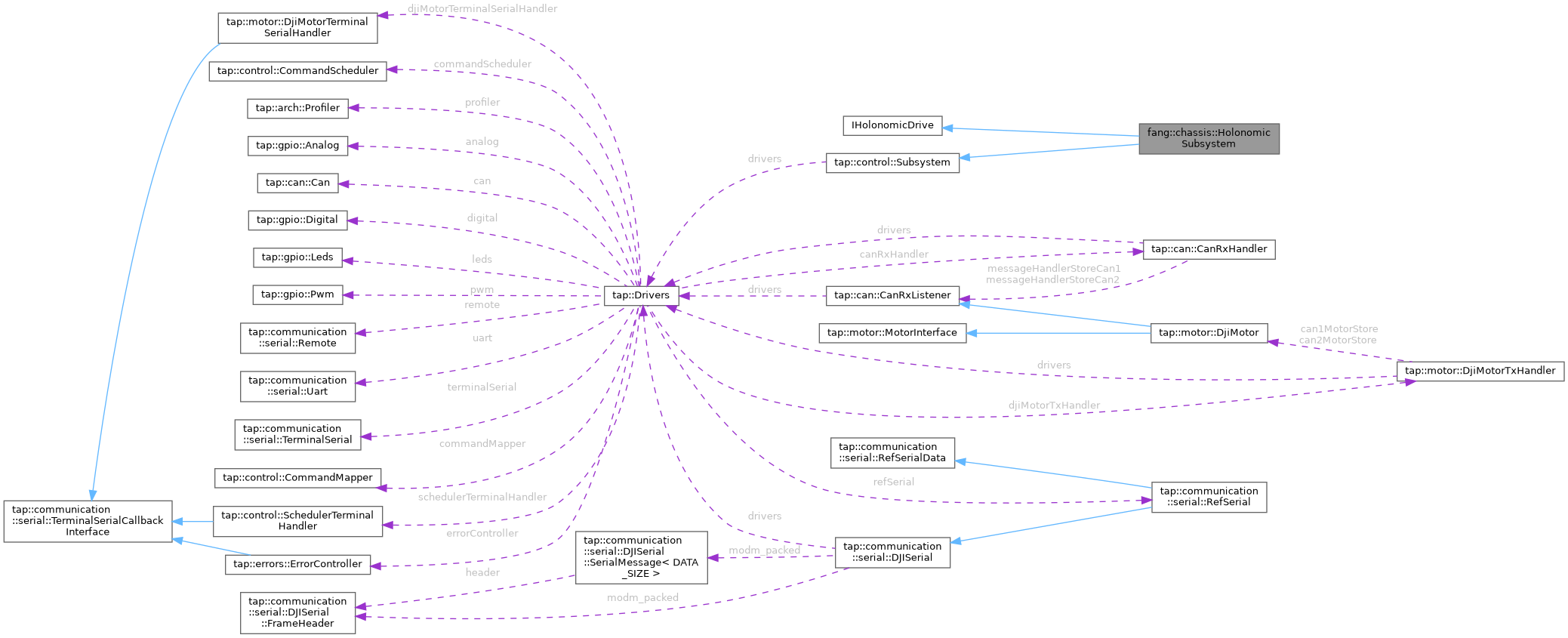
Collaboration diagram for fang::chassis::HolonomicSubsystem:
Public Member Functions | |
| HolonomicSubsystem (Drivers &drivers) | |
| virtual void | initialize () override=0 |
| virtual | ~HolonomicSubsystem () |
 Public Member Functions inherited from tap::control::Subsystem Public Member Functions inherited from tap::control::Subsystem | |
| Subsystem (Drivers *drivers) | |
| virtual | ~Subsystem () |
| void | registerAndInitialize () |
| mockable void | setDefaultCommand (Command *defaultCommand) |
| mockable Command * | getDefaultCommand () const |
| virtual void | refresh () |
| virtual void | refreshSafeDisconnect () |
| mockable void | setTestCommand (Command *testCommand) |
| mockable Command * | getTestCommand () const |
| virtual const char * | getName () const |
| mockable int | getGlobalIdentifier () const |
Additional Inherited Members | |
| Protected Attributes inherited from tap::control::Subsystem | |
| Drivers * | drivers |
Constructor & Destructor Documentation
◆ HolonomicSubsystem()
|
inline |
◆ ~HolonomicSubsystem()
|
inlinevirtual |
Member Function Documentation
◆ initialize()
Called once when you add the Subsystem to the commandScheduler stored in the Drivers class.
Reimplemented from tap::control::Subsystem.
Implemented in fang::chassis::MecanumDrive, and fang::chassis::PierceMecanumDrive.
The documentation for this class was generated from the following file:
- fang-mcb-project/src/control/chassis/drive/holonomic/holonomic_subsystem.hpp