#include <simple_feeder.hpp>
Classes | |
| struct | Config |
Public Types | |
| using | Motor = motor::ISpeedMotor |
| using | HeatLimiter = fang::turret::HeatLimiter |
Public Member Functions | |
| SimpleFeeder (Drivers &drivers, std::unique_ptr< Motor > feedMotor, const Config &config) | |
| void | feedOn () override |
| void | feedOff () override |
| void | unjamOn () override |
| void | unjamOff () override |
| bool | getActiveStatus () |
| void | initialize () override |
| void | update () override |
| void | refresh () override |
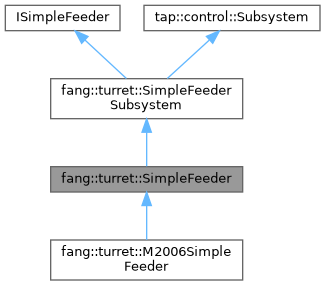
 Public Member Functions inherited from fang::turret::SimpleFeederSubsystem Public Member Functions inherited from fang::turret::SimpleFeederSubsystem | |
| SimpleFeederSubsystem (tap::Drivers &drivers) | |
| virtual | ~SimpleFeederSubsystem () |
| Public Member Functions inherited from tap::control::Subsystem | |
| Subsystem (Drivers *drivers) | |
| virtual | ~Subsystem () |
| void | registerAndInitialize () |
| mockable void | setDefaultCommand (Command *defaultCommand) |
| mockable Command * | getDefaultCommand () const |
| virtual void | refreshSafeDisconnect () |
| mockable void | setTestCommand (Command *testCommand) |
| mockable Command * | getTestCommand () const |
| virtual const char * | getName () const |
| mockable int | getGlobalIdentifier () const |
Additional Inherited Members | |
| Protected Attributes inherited from tap::control::Subsystem | |
| Drivers * | drivers |
Detailed Description
Intermediate dependency injection based class using the deprecated feeder api
Member Typedef Documentation
◆ HeatLimiter
◆ Motor
Constructor & Destructor Documentation
◆ SimpleFeeder()
| fang::turret::SimpleFeeder::SimpleFeeder | ( | Drivers & | drivers, |
| std::unique_ptr< Motor > | feedMotor, | ||
| const Config & | config | ||
| ) |
A positive value sent to the feedMotor means that it will feed.
Member Function Documentation
◆ feedOff()
|
override |
◆ feedOn()
|
override |
◆ getActiveStatus()
| bool fang::turret::SimpleFeeder::getActiveStatus | ( | ) |
Check if the feed system is feeding ammo or not.
◆ initialize()
|
overridevirtual |
Called once when you add the Subsystem to the commandScheduler stored in the Drivers class.
Implements fang::turret::SimpleFeederSubsystem.
◆ refresh()
|
overridevirtual |
Called in the scheduler's run function assuming this command has been registered with the scheduler. This function should contain code that must be periodically updated and is generic to the subsystem (i.e. updating a control loop generic to this subsystem). This function should not contain command specific control code. When you create a subclass of Subsystem, you should overwrite this virtual function.
Must be virtual otherwise scheduler will refer to this function rather than looking in child for this function.
Reimplemented from tap::control::Subsystem.
◆ unjamOff()
|
override |
◆ unjamOn()
|
override |
◆ update()
|
override |
The documentation for this class was generated from the following files:
- fang-mcb-project/src/control/turret/feeder/simple_feeder/simple_feeder.hpp
- fang-mcb-project/src/control/turret/feeder/simple_feeder/simple_feeder.cpp