Loading...
Searching...
No Matches
fang::Drivers Class Reference
#include <drivers.hpp>
Inheritance diagram for fang::Drivers:
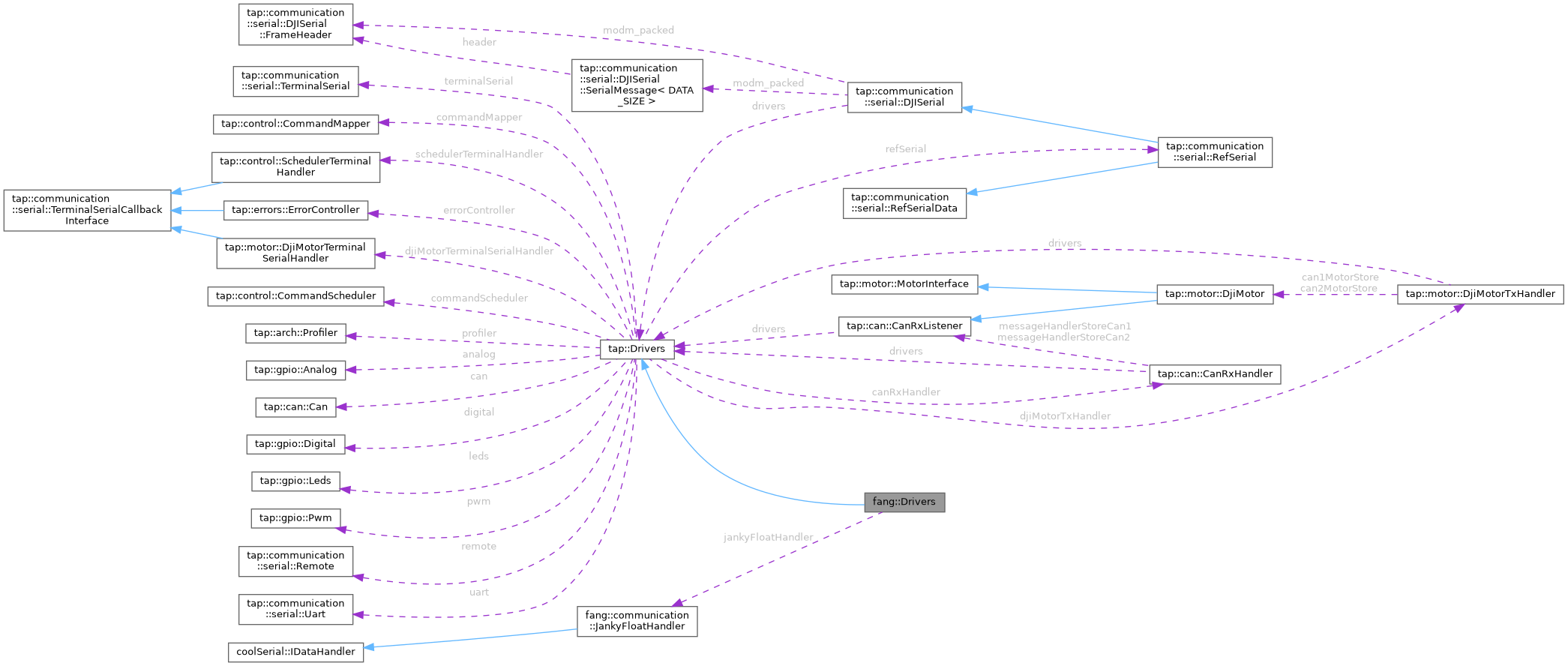
Collaboration diagram for fang::Drivers:
Public Member Functions | |
| Drivers () | |
| Drivers (const Drivers &)=delete | |
| Drivers & | operator= (Drivers &)=delete |
| void | initializeIo () |
| void | update () |
| void | updateIo () |
| void | motorTimeoutUpdate () |
| void | kill () |
Friends | |
| class | DriversSingleton |
Additional Inherited Members | |
 Protected Member Functions inherited from tap::Drivers Protected Member Functions inherited from tap::Drivers | |
| Drivers () | |
Constructor & Destructor Documentation
◆ Drivers() [1/2]
|
inline |
◆ Drivers() [2/2]
|
delete |
Member Function Documentation
◆ initializeIo()
| void fang::Drivers::initializeIo | ( | ) |
◆ kill()
| void fang::Drivers::kill | ( | ) |
- Postcondition
- The robot will be unable to move
◆ motorTimeoutUpdate()
| void fang::Drivers::motorTimeoutUpdate | ( | ) |
These are assocated classes that needs to be called at the same interval as the motors are updated (command scheduler should not spam)
◆ operator=()
◆ update()
| void fang::Drivers::update | ( | ) |
◆ updateIo()
| void fang::Drivers::updateIo | ( | ) |
Friends And Related Symbol Documentation
◆ DriversSingleton
|
friend |
Member Data Documentation
◆ jankyFloatHandler
| communication::JankyFloatHandler fang::Drivers::jankyFloatHandler {} |
The documentation for this class was generated from the following files:
- fang-mcb-project/src/driver/drivers.hpp
- fang-mcb-project/src/driver/drivers.cpp