Loading...
Searching...
No Matches
mecanum_drive.hpp File Reference
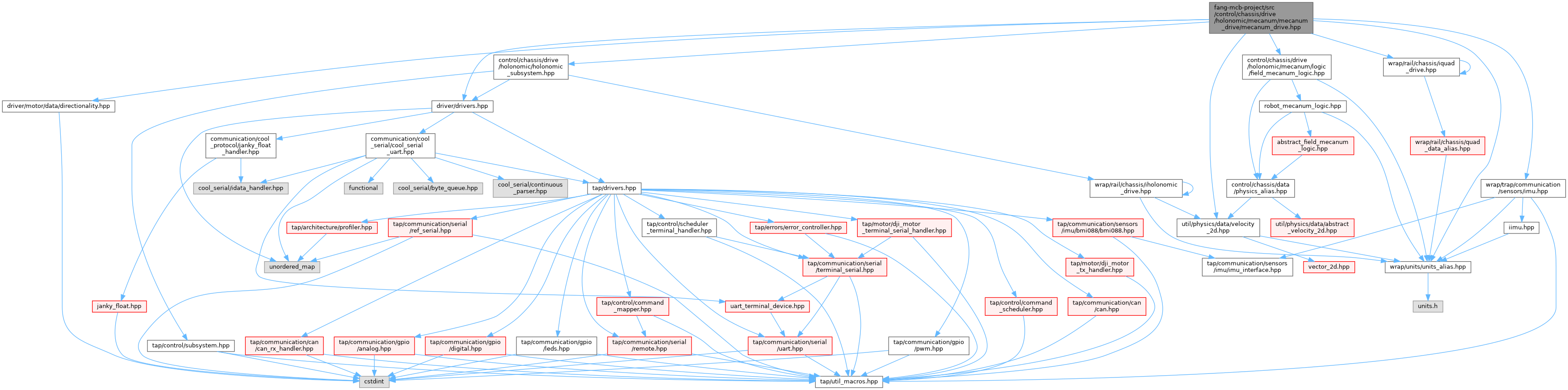
#include "driver/drivers.hpp"#include "driver/motor/data/directionality.hpp"#include "control/chassis/drive/holonomic/mecanum/logic/field_mecanum_logic.hpp"#include "control/chassis/drive/holonomic/holonomic_subsystem.hpp"#include "util/physics/data/velocity_2d.hpp"#include "wrap/units/units_alias.hpp"#include "wrap/trap/communication/sensors/imu.hpp"#include "wrap/rail/chassis/iquad_drive.hpp"
Include dependency graph for mecanum_drive.hpp:
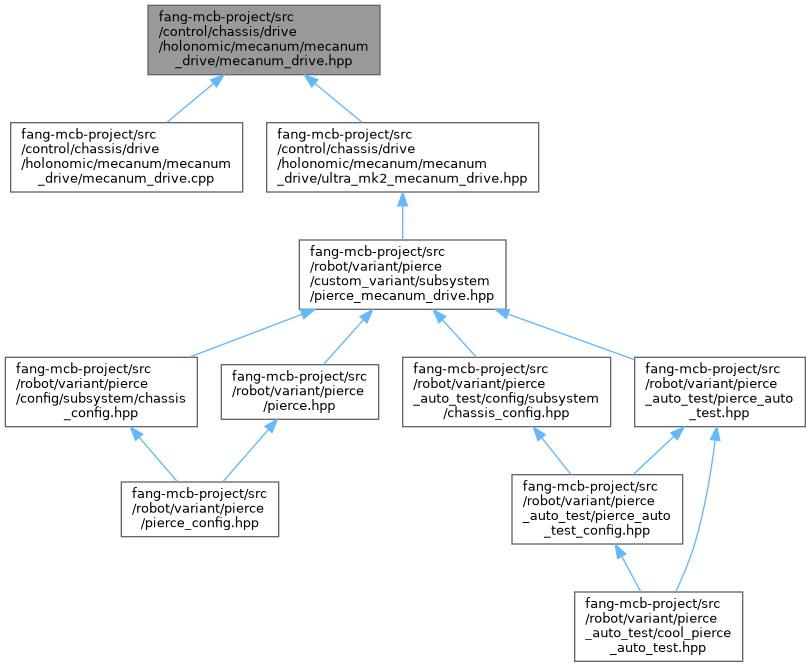
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | fang::chassis::MecanumDrive |
| struct | fang::chassis::MecanumDrive::ChassisDimensionConfig |
| struct | fang::chassis::MecanumDrive::Config |
Namespaces | |
| namespace | fang |
| namespace | fang::chassis |