Loading...
Searching...
No Matches
tap::control::setpoint::IntegrableSetpointSubsystem Class Referenceabstract
#include <integrable_setpoint_subsystem.hpp>
Inheritance diagram for tap::control::setpoint::IntegrableSetpointSubsystem:
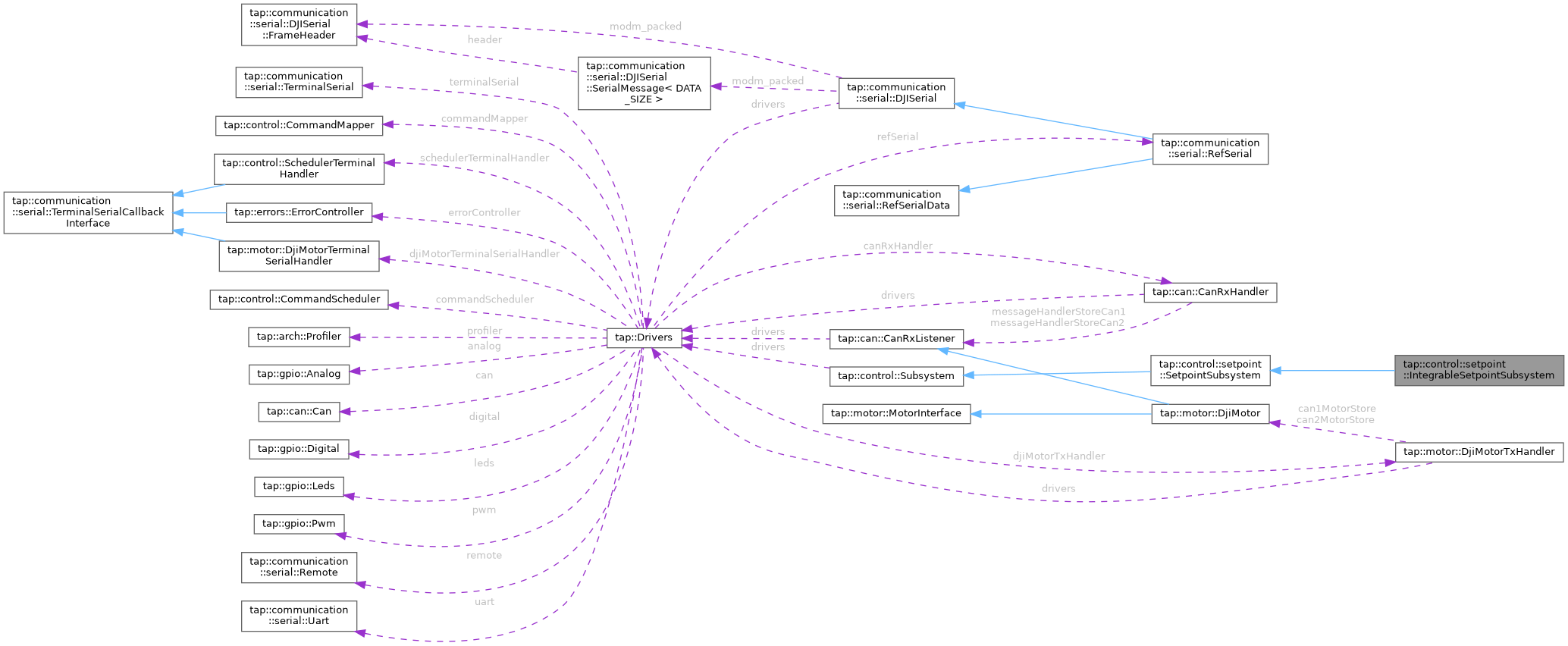
Collaboration diagram for tap::control::setpoint::IntegrableSetpointSubsystem:
Public Member Functions | |
| virtual float | getCurrentValueIntegral () const =0 |
 Public Member Functions inherited from tap::control::setpoint::SetpointSubsystem Public Member Functions inherited from tap::control::setpoint::SetpointSubsystem | |
| virtual float | getSetpoint () const =0 |
| virtual void | setSetpoint (float newAngle)=0 |
| virtual float | getCurrentValue () const =0 |
| virtual float | getJamSetpointTolerance () const =0 |
| virtual bool | calibrateHere ()=0 |
| virtual bool | isJammed ()=0 |
| virtual void | clearJam ()=0 |
| virtual bool | isCalibrated ()=0 |
| virtual bool | isOnline ()=0 |
| virtual float | getVelocity ()=0 |
| Public Member Functions inherited from tap::control::Subsystem | |
| Subsystem (Drivers *drivers) | |
| virtual | ~Subsystem () |
| virtual void | initialize () |
| void | registerAndInitialize () |
| mockable void | setDefaultCommand (Command *defaultCommand) |
| mockable Command * | getDefaultCommand () const |
| virtual void | refresh () |
| virtual void | refreshSafeDisconnect () |
| mockable void | setTestCommand (Command *testCommand) |
| mockable Command * | getTestCommand () const |
| virtual const char * | getName () const |
| mockable int | getGlobalIdentifier () const |
Additional Inherited Members | |
| Protected Attributes inherited from tap::control::Subsystem | |
| Drivers * | drivers |
Detailed Description
An extension of the SetpointSubsystem. Identical to the SetpointSubsystem except that the setpoint is assumed to be integrable. As such, an additional getCurrentValueIntegral abstract function must be implemented by those who choose to extend this class.
Member Function Documentation
◆ getCurrentValueIntegral()
|
pure virtual |
- Returns
- The current integral value of the setpoint, a measurement with units
units * seconds(units of setpoint integrated with respect to time)
The documentation for this class was generated from the following file:
- fang-mcb-project/taproot/src/tap/control/setpoint/interfaces/integrable_setpoint_subsystem.hpp