Loading...
Searching...
No Matches
chassis_config.hpp File Reference
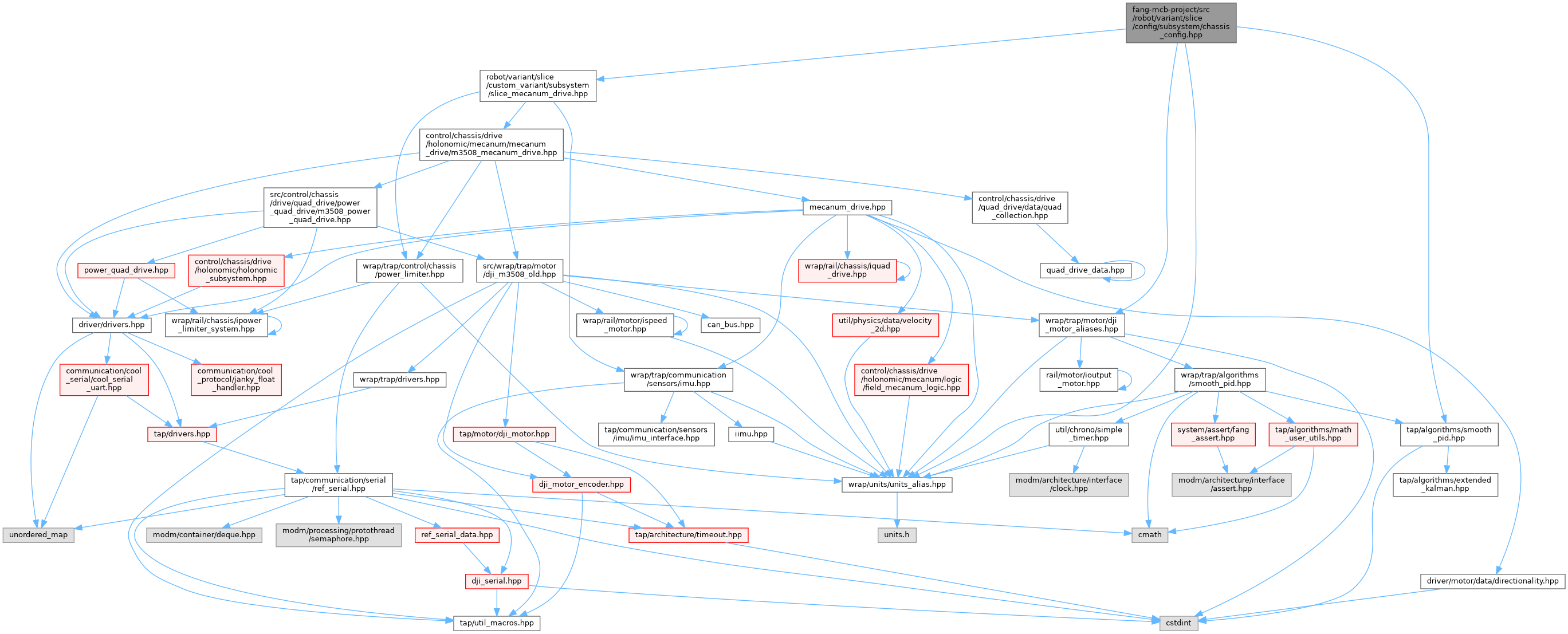
#include "robot/variant/slice/custom_variant/subsystem/slice_mecanum_drive.hpp"#include "wrap/units/units_alias.hpp"#include "wrap/trap/motor/dji_motor_aliases.hpp"#include "tap/algorithms/smooth_pid.hpp"
Include dependency graph for chassis_config.hpp:
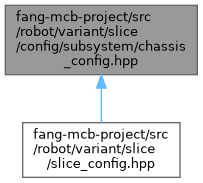
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | fang |
| namespace | fang::robot |
Variables | |
| trap::motor::DjiMotorOutput | fang::robot::M3508maxOutput {trap::motor::DjiM3508Old::k_maxOutput} |
| tap::algorithms::SmoothPidConfig | fang::robot::M3508PidConfig {.kp = 100, .ki = 0.0f, .kd = 0.0f, .maxICumulative = 0.0f, .maxOutput = M3508maxOutput} |