Loading...
Searching...
No Matches
fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError > Class Template Reference
#include <modded_cascade_motor.hpp>
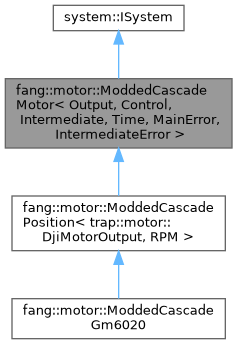
Inheritance diagram for fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError >:
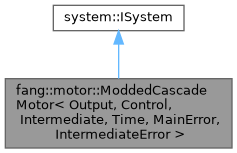
Collaboration diagram for fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError >:
Public Types | |
| using | ControlledMotor = IOutputMotor< Output > |
| using | ControlTelemetry = telemetry::ITelemetry< Control > |
| using | IntermediateTelemetry = telemetry::ITelemetry< Intermediate > |
| using | Pid = trap::algorithms::DualModdedPid< Control, Intermediate, Output, Time, MainError, IntermediateError > |
| using | Config = Pid::Config |
| using | MainModder = Pid::MainModder |
| using | IntermediateModder = Pid::IntermediateModder |
Public Member Functions | |
| ModdedCascadeMotor (const Config &config, std::unique_ptr< ControlledMotor > motor, std::unique_ptr< ControlTelemetry > controlTelemetry, std::unique_ptr< IntermediateTelemetry > intermediateTelemetry, std::unique_ptr< MainModder > mainModder=std::make_unique< trap::algorithms::NullPidModder< Intermediate > >(), std::unique_ptr< IntermediateModder > intermediateModder=std::make_unique< trap::algorithms::NullPidModder< Output > >()) | |
| void | initialize () override |
| void | update () override |
| void | update (const Time &delta) |
| void | setTarget (const Control &control) |
Detailed Description
template<typename Output, typename Control, typename Intermediate, typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
class fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError >
class fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError >
This functions exactly as DualCascadeMotor (taking an output motor and applying PID based on the telemetry it recieves)
This has an optional modders for the PID for feedForward.
For example, the output can be modded or the intermediate pid (target speed in most cases) can be given an additoinal speed target ahead of time
Template parameters: Output - the output motor it accepts Control - the type used for controlling and intermediate calculations of Pid Intermediate - the type used in between controlling and outputting (2nd pid)
Member Typedef Documentation
◆ Config
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
| using fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError >::Config = Pid::Config |
◆ ControlledMotor
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
| using fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError >::ControlledMotor = IOutputMotor<Output> |
◆ ControlTelemetry
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
| using fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError >::ControlTelemetry = telemetry::ITelemetry<Control> |
◆ IntermediateModder
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
| using fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError >::IntermediateModder = Pid::IntermediateModder |
◆ IntermediateTelemetry
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
| using fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError >::IntermediateTelemetry = telemetry::ITelemetry<Intermediate> |
◆ MainModder
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
| using fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError >::MainModder = Pid::MainModder |
◆ Pid
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
| using fang::motor::ModdedCascadeMotor< Output, Control, Intermediate, Time, MainError, IntermediateError >::Pid = trap::algorithms::DualModdedPid < Control, Intermediate, Output, Time, MainError, IntermediateError > |
Constructor & Destructor Documentation
◆ ModdedCascadeMotor()
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
|
inline |
Member Function Documentation
◆ initialize()
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
|
inlineoverride |
◆ setTarget()
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
|
inline |
◆ update() [1/2]
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
|
inlineoverride |
◆ update() [2/2]
template<typename Output , typename Control , typename Intermediate , typename Time = Seconds, typename MainError = Control, typename IntermediateError = Intermediate>
|
inline |
Back door function used for testing until we DI chrono based classes, too.
The documentation for this class was generated from the following file:
- fang-mcb-project/src/driver/motor/pid/modded_cascade_motor/modded_cascade_motor.hpp