Loading...
Searching...
No Matches
fang::chassis::TardisCommand Class Reference
#include <tardis_command.hpp>
Inheritance diagram for fang::chassis::TardisCommand:
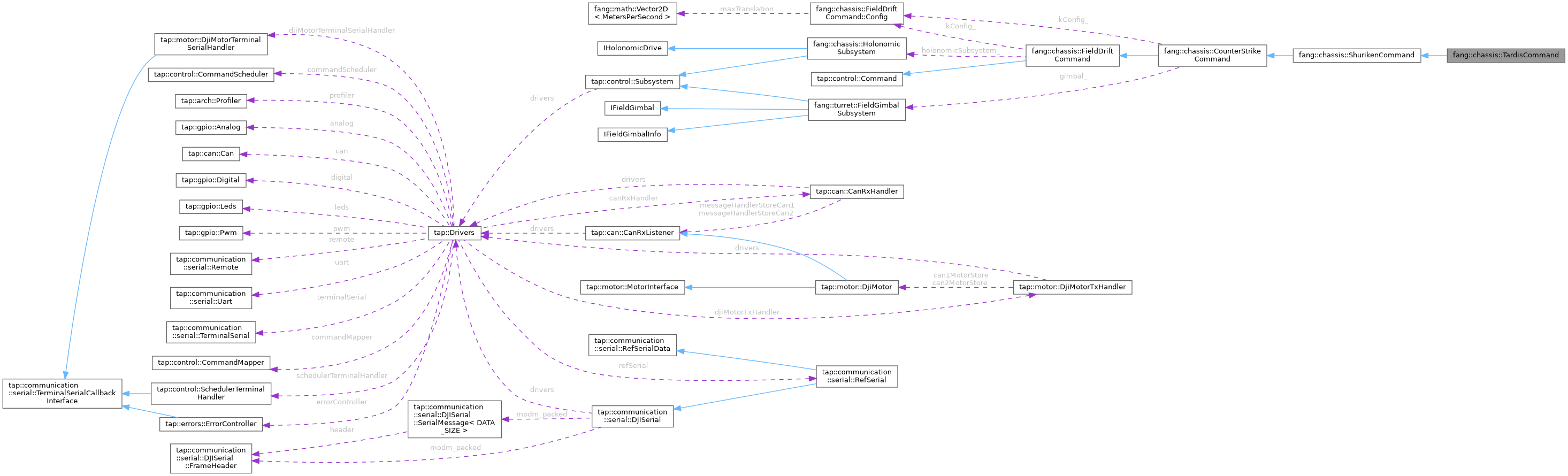
Collaboration diagram for fang::chassis::TardisCommand:
Classes | |
| struct | Config |
Public Types | |
| using | MotionConfig = CounterStrikeCommand::Config |
 Public Types inherited from fang::chassis::ShurikenCommand Public Types inherited from fang::chassis::ShurikenCommand | |
| using | MotionConfig = CounterStrikeCommand::Config |
| Public Types inherited from fang::chassis::CounterStrikeCommand | |
| using | Config = FieldDriftCommand::Config |
Public Member Functions | |
| TardisCommand (HolonomicSubsystem &chassisSubsystem, const turret::FieldGimbalSubsystem &turret, IHolonomicInput &holonomicInput, const Config &config) | |
| const char * | getName () const override |
| void | execute () override |
| Public Member Functions inherited from fang::chassis::ShurikenCommand | |
| ShurikenCommand (HolonomicSubsystem &chassisSubsystem, const turret::FieldGimbalSubsystem &gimbal, IHolonomicInput &holonomicInput, const Config &config) | |
| virtual | ~ShurikenCommand ()=default |
| Public Member Functions inherited from fang::chassis::CounterStrikeCommand | |
| CounterStrikeCommand (HolonomicSubsystem &holonomicSubsystem, const turret::FieldGimbalSubsystem &gimbal, IHolonomicInput &holonomicInput, const Config &config) | |
| virtual | ~CounterStrikeCommand ()=default |
| Public Member Functions inherited from fang::chassis::FieldDriftCommand | |
| FieldDriftCommand (HolonomicSubsystem &holonomicSubsystem, IHolonomicInput &holonomicInput, const Config &config) | |
| virtual | ~FieldDriftCommand ()=default |
| void | initialize () override |
| void | end (bool interrupted) override |
| bool | isFinished () const |
| Public Member Functions inherited from tap::control::Command | |
| Command () | |
| virtual | ~Command () |
| mockable subsystem_scheduler_bitmap_t | getRequirementsBitwise () const |
| int | getGlobalIdentifier () const |
| mockable void | addSubsystemRequirement (Subsystem *requirement) |
| virtual bool | isReady () |
Protected Member Functions | |
| RPM | getFieldRotation (const physics::Velocity2D &targetFieldTranslation) const |
| Protected Member Functions inherited from fang::chassis::ShurikenCommand | |
| RPM | getFieldRotation (const physics::Velocity2D &targetFieldTranslation) const |
| Protected Member Functions inherited from fang::chassis::CounterStrikeCommand | |
| physics::Velocity2D | getFieldTranslation () const |
| RPM | getFieldRotation () const |
| Protected Member Functions inherited from fang::chassis::FieldDriftCommand | |
| physics::Velocity2D | getFieldTranslation () const |
| RPM | getFieldRotation () const |
Additional Inherited Members | |
| Protected Attributes inherited from fang::chassis::CounterStrikeCommand | |
| const turret::FieldGimbalSubsystem & | gimbal_ |
| const Config | kConfig_ |
| Protected Attributes inherited from fang::chassis::FieldDriftCommand | |
| HolonomicSubsystem & | holonomicSubsystem_ |
| IHolonomicInput & | holonomicInput_ |
| const Config | kConfig_ |
| Protected Attributes inherited from tap::control::Command | |
| command_scheduler_bitmap_t | commandRequirementsBitwise = 0 |
| Static Protected Attributes inherited from fang::chassis::CounterStrikeCommand | |
| static constexpr const char * | kName {"Counter Strike Global!"} |
| Static Protected Attributes inherited from fang::chassis::FieldDriftCommand | |
| static constexpr const char * | kName {"Field Drift"} |
Detailed Description
This utilizes the Raziel Shredder, an family of anti-Kalman algorithms designed to induce a bias which is infinitely differentiable i.e. everything up to acceleratino is under constant change which makes linear prediction more difficult.
It does not randomize spin since Kalman Filters do overcome them.
Member Typedef Documentation
◆ MotionConfig
Constructor & Destructor Documentation
◆ TardisCommand()
| fang::chassis::TardisCommand::TardisCommand | ( | HolonomicSubsystem & | chassisSubsystem, |
| const turret::FieldGimbalSubsystem & | turret, | ||
| IHolonomicInput & | holonomicInput, | ||
| const Config & | config | ||
| ) |
This takes a chassis subsystem and the respective inputHandler
Member Function Documentation
◆ execute()
|
overridevirtual |
The main body of a command. Called repeatedly while the command is scheduled by a CommandScheduler.
Reimplemented from fang::chassis::ShurikenCommand.
◆ getFieldRotation()
|
protected |
◆ getName()
|
overridevirtual |
- Returns
- the name of the command, to be implemented by derived classes.
Reimplemented from fang::chassis::ShurikenCommand.
The documentation for this class was generated from the following files:
- fang-mcb-project/src/control/chassis/drive/holonomic/command/tardis_command.hpp
- fang-mcb-project/src/control/chassis/drive/holonomic/command/tardis_command.cpp