Loading...
Searching...
No Matches
fang::chassis::ShurikenCommand Class Reference
#include <shuriken_command.hpp>
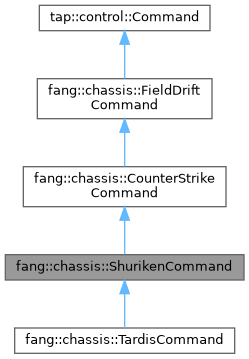
Inheritance diagram for fang::chassis::ShurikenCommand:
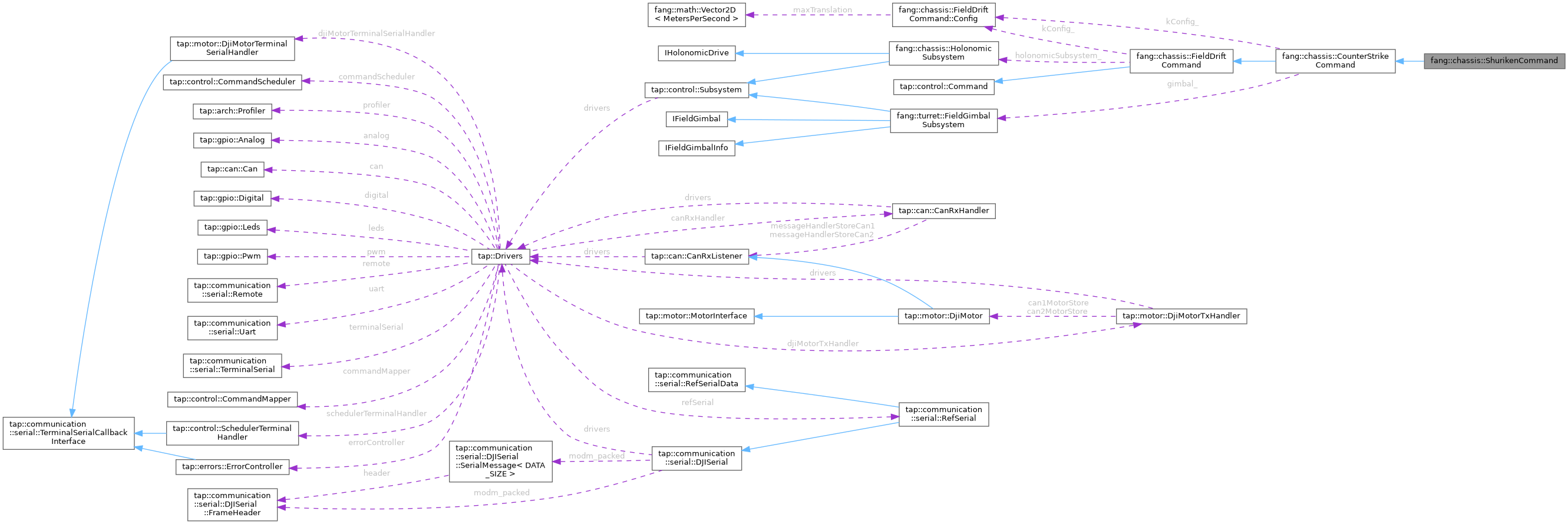
Collaboration diagram for fang::chassis::ShurikenCommand:
Classes | |
| struct | Config |
Public Types | |
| using | MotionConfig = CounterStrikeCommand::Config |
 Public Types inherited from fang::chassis::CounterStrikeCommand Public Types inherited from fang::chassis::CounterStrikeCommand | |
| using | Config = FieldDriftCommand::Config |
Public Member Functions | |
| ShurikenCommand (HolonomicSubsystem &chassisSubsystem, const turret::FieldGimbalSubsystem &gimbal, IHolonomicInput &holonomicInput, const Config &config) | |
| virtual | ~ShurikenCommand ()=default |
| const char * | getName () const override |
| void | execute () override |
| Public Member Functions inherited from fang::chassis::CounterStrikeCommand | |
| CounterStrikeCommand (HolonomicSubsystem &holonomicSubsystem, const turret::FieldGimbalSubsystem &gimbal, IHolonomicInput &holonomicInput, const Config &config) | |
| virtual | ~CounterStrikeCommand ()=default |
| Public Member Functions inherited from fang::chassis::FieldDriftCommand | |
| FieldDriftCommand (HolonomicSubsystem &holonomicSubsystem, IHolonomicInput &holonomicInput, const Config &config) | |
| virtual | ~FieldDriftCommand ()=default |
| void | initialize () override |
| void | end (bool interrupted) override |
| bool | isFinished () const |
| Public Member Functions inherited from tap::control::Command | |
| Command () | |
| virtual | ~Command () |
| mockable subsystem_scheduler_bitmap_t | getRequirementsBitwise () const |
| int | getGlobalIdentifier () const |
| mockable void | addSubsystemRequirement (Subsystem *requirement) |
| virtual bool | isReady () |
Protected Member Functions | |
| RPM | getFieldRotation (const physics::Velocity2D &targetFieldTranslation) const |
| Protected Member Functions inherited from fang::chassis::CounterStrikeCommand | |
| physics::Velocity2D | getFieldTranslation () const |
| RPM | getFieldRotation () const |
| Protected Member Functions inherited from fang::chassis::FieldDriftCommand | |
| physics::Velocity2D | getFieldTranslation () const |
| RPM | getFieldRotation () const |
Additional Inherited Members | |
| Protected Attributes inherited from fang::chassis::CounterStrikeCommand | |
| const turret::FieldGimbalSubsystem & | gimbal_ |
| const Config | kConfig_ |
| Protected Attributes inherited from fang::chassis::FieldDriftCommand | |
| HolonomicSubsystem & | holonomicSubsystem_ |
| IHolonomicInput & | holonomicInput_ |
| const Config | kConfig_ |
| Protected Attributes inherited from tap::control::Command | |
| command_scheduler_bitmap_t | commandRequirementsBitwise = 0 |
| Static Protected Attributes inherited from fang::chassis::CounterStrikeCommand | |
| static constexpr const char * | kName {"Counter Strike Global!"} |
| Static Protected Attributes inherited from fang::chassis::FieldDriftCommand | |
| static constexpr const char * | kName {"Field Drift"} |
Detailed Description
The holonomic drive will automatically spin
Member Typedef Documentation
◆ MotionConfig
Constructor & Destructor Documentation
◆ ShurikenCommand()
| fang::chassis::ShurikenCommand::ShurikenCommand | ( | HolonomicSubsystem & | chassisSubsystem, |
| const turret::FieldGimbalSubsystem & | gimbal, | ||
| IHolonomicInput & | holonomicInput, | ||
| const Config & | config | ||
| ) |
This takes a chassis subsystem and the respective inputHandler
◆ ~ShurikenCommand()
|
virtualdefault |
Member Function Documentation
◆ execute()
|
overridevirtual |
The main body of a command. Called repeatedly while the command is scheduled by a CommandScheduler.
Reimplemented from fang::chassis::CounterStrikeCommand.
Reimplemented in fang::chassis::TardisCommand.
◆ getFieldRotation()
|
protected |
Translates the rotation input on the remote into a rotation where counterclockwise is positive
It also downscales the angular velocity inversly proportional to the targetFieldTranslation
◆ getName()
|
overridevirtual |
- Returns
- the name of the command, to be implemented by derived classes.
Reimplemented from fang::chassis::CounterStrikeCommand.
Reimplemented in fang::chassis::TardisCommand.
The documentation for this class was generated from the following files:
- fang-mcb-project/src/control/chassis/drive/holonomic/command/shuriken_command.hpp
- fang-mcb-project/src/control/chassis/drive/holonomic/command/shuriken_command.cpp