Loading...
Searching...
No Matches
pierce_auto_test_command_pack.hpp File Reference
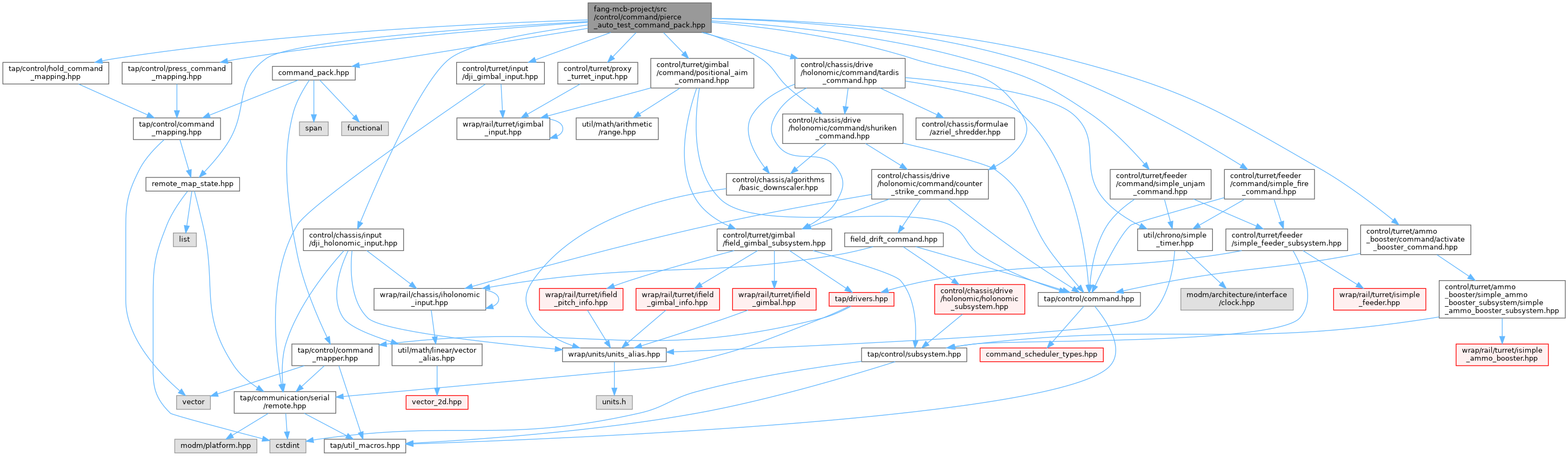
#include "command_pack.hpp"#include "control/turret/proxy_turret_input.hpp"#include "control/turret/input/dji_gimbal_input.hpp"#include "control/chassis/input/dji_holonomic_input.hpp"#include "control/chassis/drive/holonomic/command/counter_strike_command.hpp"#include "control/chassis/drive/holonomic/command/shuriken_command.hpp"#include "control/chassis/drive/holonomic/command/tardis_command.hpp"#include "control/turret/gimbal/command/positional_aim_command.hpp"#include "control/turret/ammo_booster/command/activate_booster_command.hpp"#include "control/turret/feeder/command/simple_fire_command.hpp"#include "control/turret/feeder/command/simple_unjam_command.hpp"#include "tap/control/press_command_mapping.hpp"#include "tap/control/hold_command_mapping.hpp"#include "tap/control/remote_map_state.hpp"
Include dependency graph for pierce_auto_test_command_pack.hpp:
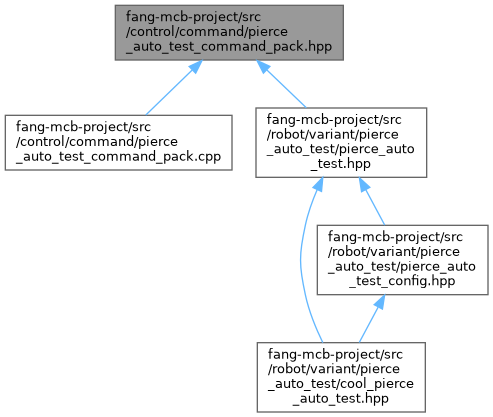
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | fang |
| namespace | fang::command |