Loading...
Searching...
No Matches
calibrate_command.cpp File Reference
#include "calibrate_command.hpp"#include "tap/control/setpoint/interfaces/setpoint_subsystem.hpp"#include "tap/control/subsystem.hpp"
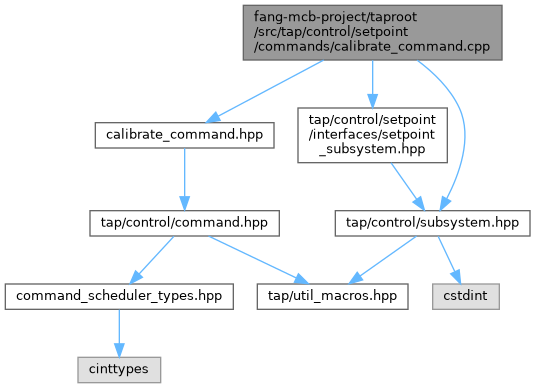
Include dependency graph for calibrate_command.cpp:
Namespaces | |
| namespace | tap |
| namespace | tap::control |
| namespace | tap::control::setpoint |