Loading...
Searching...
No Matches
tap::control::setpoint::SetpointSubsystem Class Referenceabstract
#include <setpoint_subsystem.hpp>
Inheritance diagram for tap::control::setpoint::SetpointSubsystem:
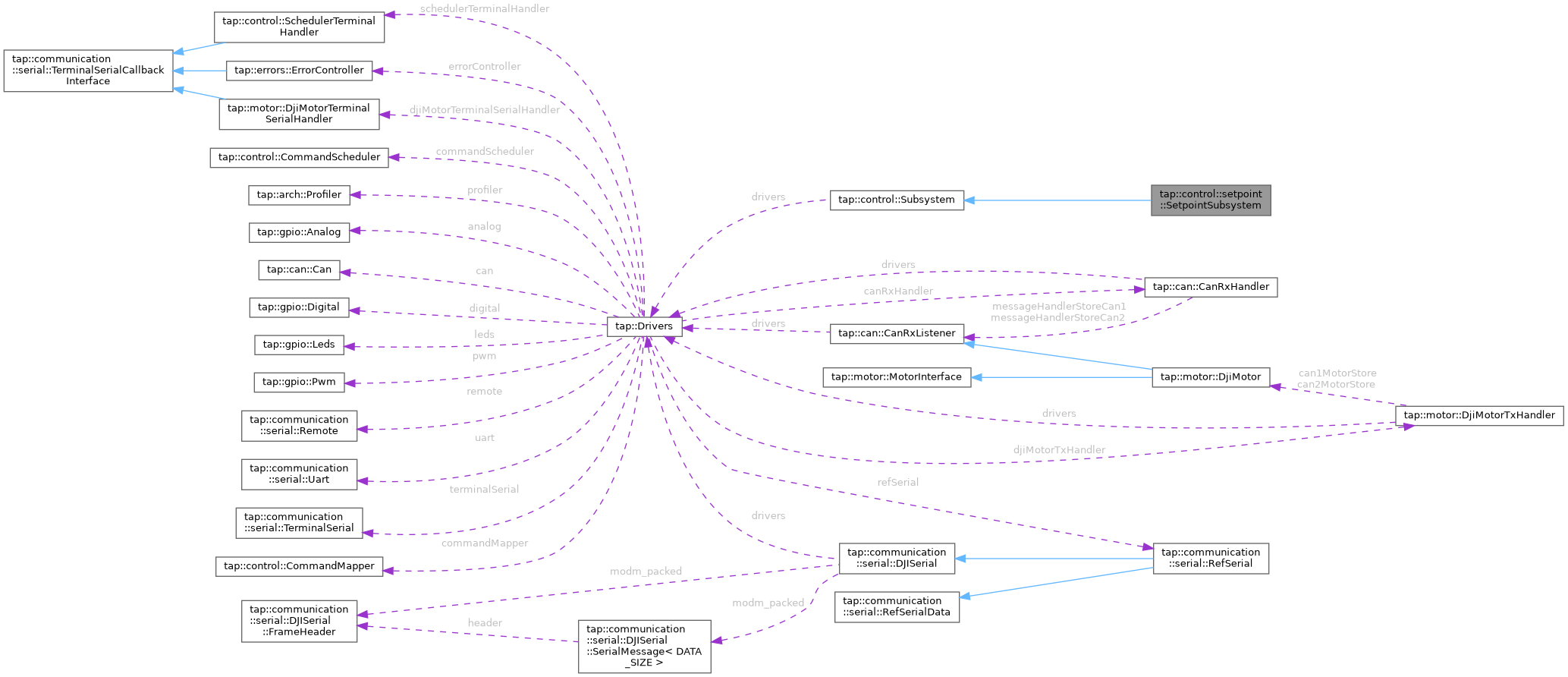
Collaboration diagram for tap::control::setpoint::SetpointSubsystem:
Public Member Functions | |
| virtual float | getSetpoint () const =0 |
| virtual void | setSetpoint (float newAngle)=0 |
| virtual float | getCurrentValue () const =0 |
| virtual float | getJamSetpointTolerance () const =0 |
| virtual bool | calibrateHere ()=0 |
| virtual bool | isJammed ()=0 |
| virtual void | clearJam ()=0 |
| virtual bool | isCalibrated ()=0 |
| virtual bool | isOnline ()=0 |
| virtual float | getVelocity ()=0 |
 Public Member Functions inherited from tap::control::Subsystem Public Member Functions inherited from tap::control::Subsystem | |
| Subsystem (Drivers *drivers) | |
| virtual | ~Subsystem () |
| virtual void | initialize () |
| void | registerAndInitialize () |
| mockable void | setDefaultCommand (Command *defaultCommand) |
| mockable Command * | getDefaultCommand () const |
| virtual void | refresh () |
| virtual void | refreshSafeDisconnect () |
| mockable void | setTestCommand (Command *testCommand) |
| mockable Command * | getTestCommand () const |
| virtual const char * | getName () const |
| mockable int | getGlobalIdentifier () const |
Additional Inherited Members | |
| Protected Attributes inherited from tap::control::Subsystem | |
| Drivers * | drivers |
Detailed Description
An abstract class (usable as an interface) describing the functionalities of a subsystem which uses a positional controller to rotate something.
Any mention of position in the documentation for this class does not necessarily refer to a physical location in space, rather it refers to a quantity describing whatever is being positionally controlled by the subsystem.
Member Function Documentation
◆ calibrateHere()
|
pure virtual |
Attempts to calibrate the subsystem at the current position, such that getCurrentValue will return 0 units at this position.
- Returns
trueif the subsystem has been successfully calibrated,falseotherwise.
◆ clearJam()
|
pure virtual |
Call to clear the jam flag of the subsystem, indicating that the jam has been solved.
- Todo:
- At some point we should move the unjam command logic into the subsystems
◆ getCurrentValue()
|
pure virtual |
- Returns
- The current value of the controlled variable.
◆ getJamSetpointTolerance()
|
pure virtual |
- Returns
- the jamming tolerance. This is the maximum distance between the ideal setpoint and current value of the controlled variable at which the subsystem will never consider itself jammed.
◆ getSetpoint()
|
inlinepure virtual |
- Returns
- the subsystem's setpoint: the desired value of whatever is being controlled.
◆ getVelocity()
|
inlinepure virtual |
- Returns
- the velocity of the subsystem (i.e.: the rate of change of the controlled variable's value).
◆ isCalibrated()
|
inlinepure virtual |
- Returns
trueif the subsystem has been calibrated
◆ isJammed()
|
pure virtual |
- Returns
trueif the subsystem unjam timer has expired, signaling that the subsystem has jammed,falseotherwise.
◆ isOnline()
|
inlinepure virtual |
- Returns
trueif the subsystem is online (i.e.: is connected)
◆ setSetpoint()
|
inlinepure virtual |
Sets the desired position of the subsystem, relative to where it was calibrated.
- Parameters
-
[in] newValue the new desired value the subsystem will try to reach.
The documentation for this class was generated from the following file:
- fang-mcb-project/taproot/src/tap/control/setpoint/interfaces/setpoint_subsystem.hpp