Loading...
Searching...
No Matches
tap::motor::DoubleDjiMotor Class Reference
#include <double_dji_motor.hpp>
Inheritance diagram for tap::motor::DoubleDjiMotor:
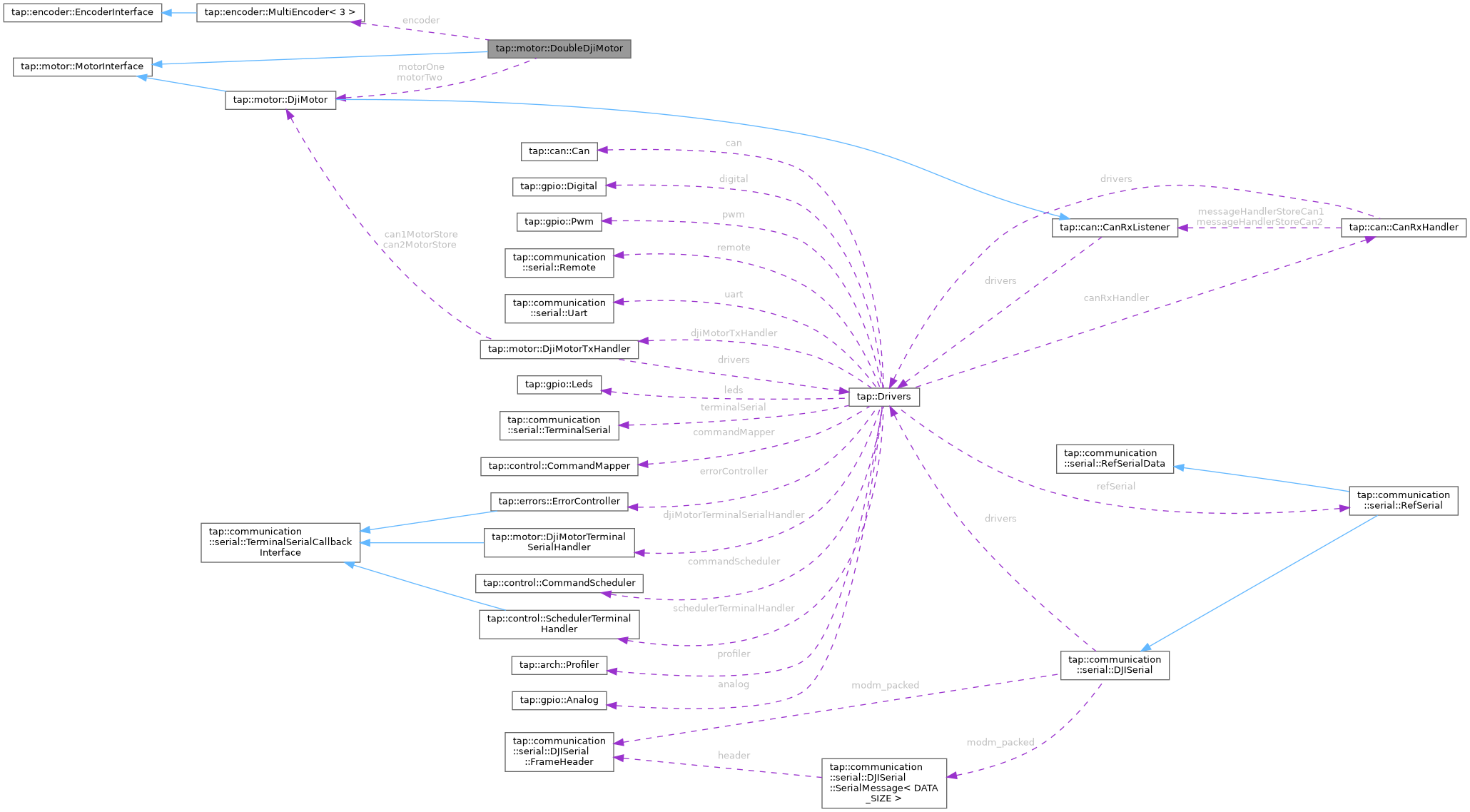
Collaboration diagram for tap::motor::DoubleDjiMotor:
Public Member Functions | |
| DoubleDjiMotor (Drivers *drivers, MotorId desMotorIdentifierOne, MotorId desMotorIdentifierTwo, tap::can::CanBus motorCanBusOne, tap::can::CanBus motorCanBusTwo, bool isInvertedOne, bool isInvertedTwo, const char *nameOne, const char *nameTwo, bool currentControl=false, float gearRatio=1, uint32_t encoderHomePositionOne=0, tap::encoder::EncoderInterface *externalEncoder=nullptr) | |
| void | initialize () override |
| tap::encoder::EncoderInterface * | getEncoder () const override |
| void | setDesiredOutput (int32_t desiredOutput) override |
| bool | isMotorOnline () const override |
| int16_t | getOutputDesired () const override |
| int8_t | getTemperature () const override |
| int16_t | getTorque () const override |
 Public Member Functions inherited from tap::motor::MotorInterface Public Member Functions inherited from tap::motor::MotorInterface | |
| virtual void | resetEncoderValue () |
| virtual float | getPositionUnwrapped () const |
| virtual float | getPositionWrapped () const |
| virtual int16_t | getShaftRPM () const |
Protected Attributes | |
| DjiMotor | motorOne |
| DjiMotor | motorTwo |
| tap::encoder::MultiEncoder< 3 > | encoder |
Detailed Description
Wraps two motors assumed to be connected to a rigid drive shaft. Assumes that the two motors are identical with the same gear ratio and are dji motors with the same communication and control interface (for example, two M3508's, two 6020's, etc.).
Constructor & Destructor Documentation
◆ DoubleDjiMotor()
| tap::motor::DoubleDjiMotor::DoubleDjiMotor | ( | Drivers * | drivers, |
| MotorId | desMotorIdentifierOne, | ||
| MotorId | desMotorIdentifierTwo, | ||
| tap::can::CanBus | motorCanBusOne, | ||
| tap::can::CanBus | motorCanBusTwo, | ||
| bool | isInvertedOne, | ||
| bool | isInvertedTwo, | ||
| const char * | nameOne, | ||
| const char * | nameTwo, | ||
| bool | currentControl = false, |
||
| float | gearRatio = 1, |
||
| uint32_t | encoderHomePositionOne = 0, |
||
| tap::encoder::EncoderInterface * | externalEncoder = nullptr |
||
| ) |
Member Function Documentation
◆ getEncoder()
|
inlineoverridevirtual |
Implements tap::motor::MotorInterface.
◆ getOutputDesired()
|
overridevirtual |
Implements tap::motor::MotorInterface.
◆ getTemperature()
|
overridevirtual |
Implements tap::motor::MotorInterface.
◆ getTorque()
|
overridevirtual |
Implements tap::motor::MotorInterface.
◆ initialize()
|
overridevirtual |
Implements tap::motor::MotorInterface.
◆ isMotorOnline()
|
overridevirtual |
Implements tap::motor::MotorInterface.
◆ setDesiredOutput()
|
overridevirtual |
Implements tap::motor::MotorInterface.
Member Data Documentation
◆ encoder
|
protected |
◆ motorOne
|
protected |
◆ motorTwo
|
protected |
The documentation for this class was generated from the following files:
- fang-mcb-project/taproot/src/tap/motor/double_dji_motor.hpp
- fang-mcb-project/taproot/src/tap/motor/double_dji_motor.cpp