#include <dji_motor.hpp>
Public Member Functions | |
| DjiMotor (Drivers *drivers, MotorId desMotorIdentifier, tap::can::CanBus motorCanBus, bool isInverted, const char *name, bool currentControl=false, float gearRatio=1, uint32_t encoderHomePosition=0, tap::encoder::EncoderInterface *externalEncoder=nullptr) | |
| mockable | ~DjiMotor () |
| void | initialize () override |
| tap::encoder::EncoderInterface * | getEncoder () const override |
| mockable const Encoder & | getInternalEncoder () const |
| void | processMessage (const modm::can::Message &message) override |
| void | setDesiredOutput (int32_t desiredOutput) override |
| bool | isMotorOnline () const override |
| mockable void | serializeCanSendData (modm::can::Message *txMessage) const |
| int16_t | getOutputDesired () const override |
| mockable uint32_t | getMotorIdentifier () const |
| int8_t | getTemperature () const override |
| int16_t | getTorque () const override |
| mockable bool | isMotorInverted () const |
| mockable tap::can::CanBus | getCanBus () const |
| mockable const char * | getName () const |
| mockable bool | isInCurrentControl () const |
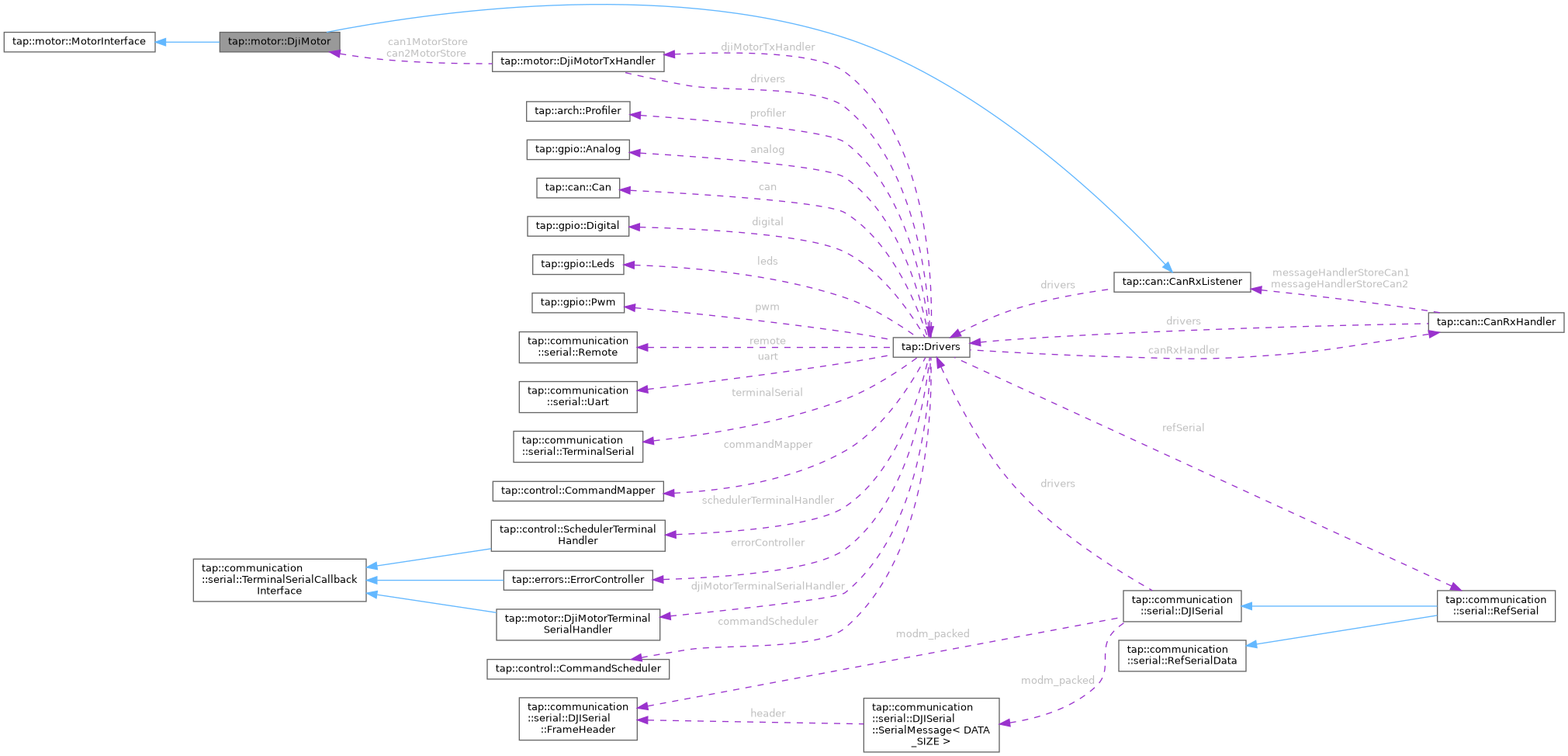
 Public Member Functions inherited from tap::can::CanRxListener Public Member Functions inherited from tap::can::CanRxListener | |
| CanRxListener (Drivers *drivers, uint32_t id, CanBus cB) | |
| ~CanRxListener () | |
| mockable void | attachSelfToRxHandler () |
| Public Member Functions inherited from tap::motor::MotorInterface | |
| virtual void | resetEncoderValue () |
| virtual float | getPositionUnwrapped () const |
| virtual float | getPositionWrapped () const |
| virtual int16_t | getShaftRPM () const |
Static Public Attributes | |
| static constexpr uint16_t | MAX_OUTPUT_C610 = 10000 |
| static constexpr uint16_t | MAX_OUTPUT_C620 = 16384 |
| static constexpr uint16_t | MAX_OUTPUT_820R = 32767 |
| static constexpr uint16_t | MAX_OUTPUT_GM6020 = 25000 |
| static constexpr uint16_t | MAX_OUTPUT_GM3510 = 29000 |
Additional Inherited Members | |
| Public Attributes inherited from tap::can::CanRxListener | |
| const uint32_t | canIdentifier |
| const CanBus | canBus |
| Drivers * | drivers |
Detailed Description
A class designed to interface with DJI brand motors and motor controllers over CAN. This includes the C610 and C620 motor controllers and the GM6020 motor (that has a built-in motor controller).
- Note
- : the default positive rotation direction (i.e.: when
this->isMotorInverted() == false) is counter clockwise when looking at the shaft from the side opposite the motor. This is specified in the C620 user manual (page 18).
- See also
- DjiMotorEncoder
Extends the CanRxListener class to attach a message handler for feedback data from the motor to the CAN Rx dispatch handler.
- Note
- Currently there is no error handling for using a motor without having it be properly initialize. You must call the
initializefunction in order for this class to work properly.
Constructor & Destructor Documentation
◆ DjiMotor()
| tap::motor::DjiMotor::DjiMotor | ( | Drivers * | drivers, |
| MotorId | desMotorIdentifier, | ||
| tap::can::CanBus | motorCanBus, | ||
| bool | isInverted, | ||
| const char * | name, | ||
| bool | currentControl = false, |
||
| float | gearRatio = 1, |
||
| uint32_t | encoderHomePosition = 0, |
||
| tap::encoder::EncoderInterface * | externalEncoder = nullptr |
||
| ) |
- Parameters
-
drivers a pointer to the drivers struct desMotorIdentifier the ID of this motor controller motorCanBus the CAN bus the motor is on isInverted if falsethe positive rotation direction of the shaft is counter-clockwise when looking at the shaft from the side opposite the motor. Iftruethen the positive rotation direction will be clockwise.name a name to associate with the motor for use in the motor menu gearRatio the ratio of input revolutions to output revolutions of this encoder. encoderHomePosition the zero position for the encoder in encoder ticks. externalEncoder a pointer to an external encoder to average with the internal encoder.
◆ ~DjiMotor()
| tap::motor::DjiMotor::~DjiMotor | ( | ) |
Member Function Documentation
◆ getCanBus()
| tap::can::CanBus tap::motor::DjiMotor::getCanBus | ( | ) | const |
◆ getEncoder()
|
inlineoverridevirtual |
Implements tap::motor::MotorInterface.
◆ getInternalEncoder()
Returns the builtin encoder associated with the motor.
◆ getMotorIdentifier()
| uint32_t tap::motor::DjiMotor::getMotorIdentifier | ( | ) | const |
◆ getName()
| const char * tap::motor::DjiMotor::getName | ( | ) | const |
◆ getOutputDesired()
|
overridevirtual |
- Returns
- the raw
desiredOutputvalue which will be sent to the motor controller (specified viasetDesiredOutput())
Implements tap::motor::MotorInterface.
◆ getTemperature()
|
overridevirtual |
- Returns
- the temperature of the motor as reported by the motor in degrees Celsius
Implements tap::motor::MotorInterface.
◆ getTorque()
|
overridevirtual |
Implements tap::motor::MotorInterface.
◆ initialize()
|
overridevirtual |
Implements tap::motor::MotorInterface.
◆ isInCurrentControl()
| bool tap::motor::DjiMotor::isInCurrentControl | ( | ) | const |
◆ isMotorInverted()
| bool tap::motor::DjiMotor::isMotorInverted | ( | ) | const |
◆ isMotorOnline()
|
overridevirtual |
- Returns
trueif a CAN message has been received from the motor within the lastMOTOR_DISCONNECT_TIMEms,falseotherwise.
Implements tap::motor::MotorInterface.
◆ processMessage()
|
overridevirtual |
Overrides virtual method in the can class, called every time a message with the CAN message id this class is attached to is received by the can receive handler. Parses the data in the message and updates this class's fields accordingly.
- Parameters
-
[in] message the message to be processed.
Implements tap::can::CanRxListener.
◆ serializeCanSendData()
| void tap::motor::DjiMotor::serializeCanSendData | ( | modm::can::Message * | txMessage | ) | const |
Serializes send data and deposits it in a message to be sent.
◆ setDesiredOutput()
|
overridevirtual |
Set the desired output for the motor. The meaning of this value is motor controller specific.
- Parameters
-
[in] desiredOutput the desired motor output. Limited to the range of a 16-bit int.
- Note
- :
desiredOutputis cast to an int16_t and limited to an int16_t's range! The user should make sure their value is in range. The declaration takes an int32_t in hopes to mitigate overflow.
Implements tap::motor::MotorInterface.
Member Data Documentation
◆ MAX_OUTPUT_820R
|
staticconstexpr |
◆ MAX_OUTPUT_C610
|
staticconstexpr |
◆ MAX_OUTPUT_C620
|
staticconstexpr |
◆ MAX_OUTPUT_GM3510
|
staticconstexpr |
◆ MAX_OUTPUT_GM6020
|
staticconstexpr |
The documentation for this class was generated from the following files:
- fang-mcb-project/taproot/src/tap/motor/dji_motor.hpp
- fang-mcb-project/taproot/src/tap/motor/dji_motor.cpp