Loading...
Searching...
No Matches
dji_motor_tx_handler.hpp File Reference
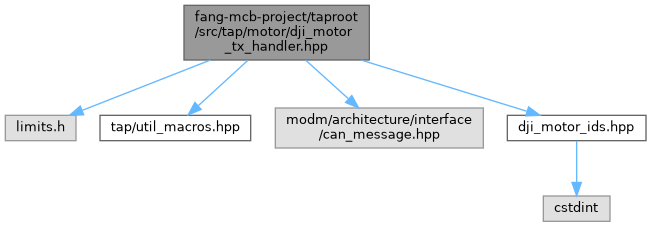
#include <limits.h>#include "tap/util_macros.hpp"#include "modm/architecture/interface/can_message.hpp"#include "dji_motor_ids.hpp"
Include dependency graph for dji_motor_tx_handler.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | tap::motor::DjiMotorTxHandler |
Namespaces | |
| namespace | tap |
| namespace | tap::motor |
Macros | |
| #define | DJI_MOTOR_TO_NORMALIZED_ID(id) |
| #define | NORMALIZED_ID_TO_DJI_MOTOR(idx) static_cast<tap::motor::MotorId>(idx + static_cast<int32_t>(tap::motor::MotorId::MOTOR1)) |
Macro Definition Documentation
◆ DJI_MOTOR_TO_NORMALIZED_ID
| #define DJI_MOTOR_TO_NORMALIZED_ID | ( | id | ) |
Value:
static_cast<uint32_t>( \
: (id - tap::motor::MOTOR1))
static constexpr int DJI_MOTORS_PER_CAN
Definition dji_motor_tx_handler.hpp:77
Converts the dji MotorId to a uint32_t.
- Parameters
-
[in] id Some CAN MotorId
- Returns
- id normalized to be around [0, DJI_MOTORS_PER_CAN), or some value >= DJI_MOTORS_PER_CAN if the id is out of bounds
◆ NORMALIZED_ID_TO_DJI_MOTOR
| #define NORMALIZED_ID_TO_DJI_MOTOR | ( | idx | ) | static_cast<tap::motor::MotorId>(idx + static_cast<int32_t>(tap::motor::MotorId::MOTOR1)) |
Converts the dji MotorId to a uint32_t.
- Parameters
-
[in] idx Some index, a motor id index normalized between [0, DJI_MOTORS_PER_CAN)
- Returns
- idx, converted to a MotorId