Loading...
Searching...
No Matches
tap::control::turret::TurretSubsystemInterface Class Referenceabstract
#include <turret_subsystem_interface.hpp>
Inheritance diagram for tap::control::turret::TurretSubsystemInterface:
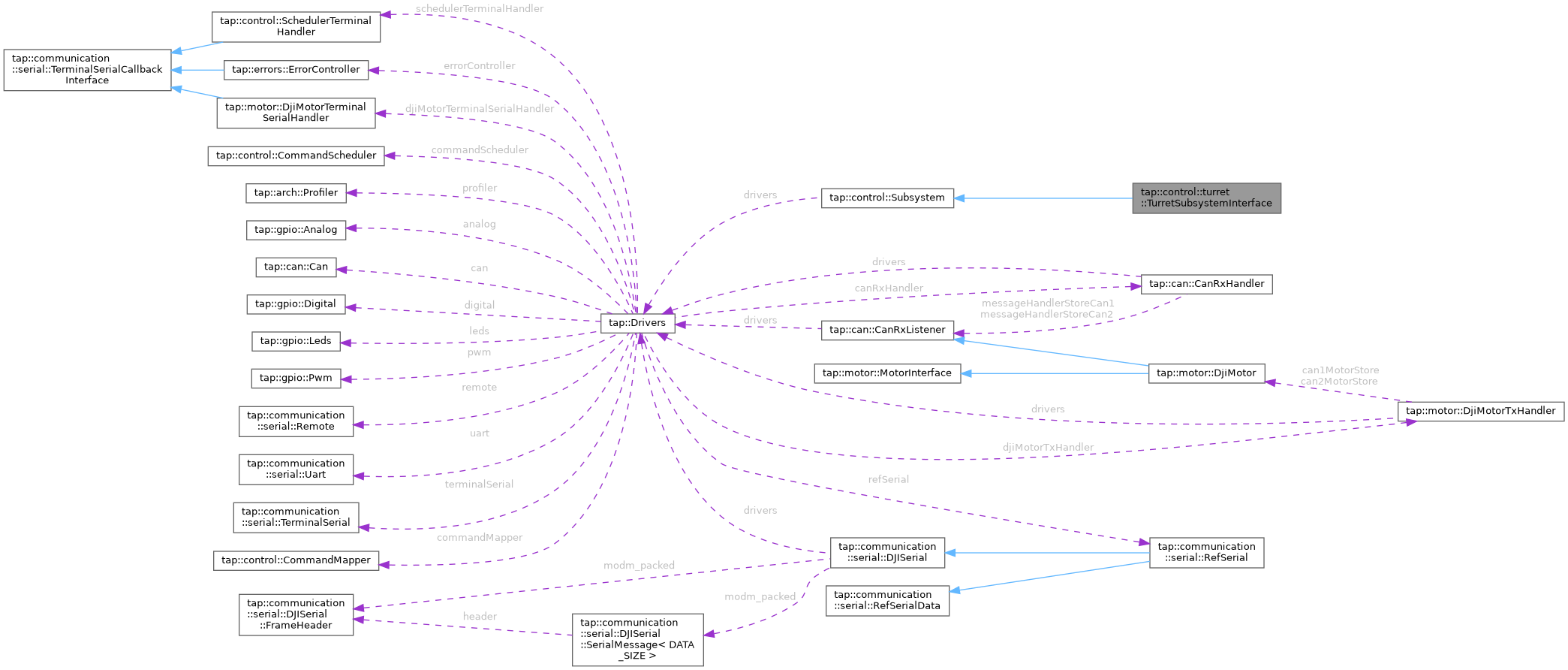
Collaboration diagram for tap::control::turret::TurretSubsystemInterface:
Public Member Functions | |
| TurretSubsystemInterface (Drivers *drivers) | |
| virtual float | getYawSetpoint () const =0 |
| virtual float | getPitchSetpoint () const =0 |
| virtual void | setYawSetpoint (float newAngle)=0 |
| virtual void | setPitchSetpoint (float newAngle)=0 |
| virtual const tap::algorithms::WrappedFloat & | getCurrentYawValue () const =0 |
| virtual const tap::algorithms::WrappedFloat & | getCurrentPitchValue () const =0 |
| virtual bool | isOnline () const =0 |
| virtual float | getYawVelocity () const =0 |
| virtual float | getPitchVelocity () const =0 |
| virtual float | getYawAngleFromCenter () const =0 |
| virtual float | getPitchAngleFromCenter () const =0 |
| virtual void | setYawMotorOutput (float out)=0 |
| virtual void | setPitchMotorOutput (float out)=0 |
| virtual bool | yawLimited () const =0 |
 Public Member Functions inherited from tap::control::Subsystem Public Member Functions inherited from tap::control::Subsystem | |
| Subsystem (Drivers *drivers) | |
| virtual | ~Subsystem () |
| virtual void | initialize () |
| void | registerAndInitialize () |
| mockable void | setDefaultCommand (Command *defaultCommand) |
| mockable Command * | getDefaultCommand () const |
| virtual void | refresh () |
| virtual void | refreshSafeDisconnect () |
| mockable void | setTestCommand (Command *testCommand) |
| mockable Command * | getTestCommand () const |
| virtual const char * | getName () const |
| mockable int | getGlobalIdentifier () const |
Additional Inherited Members | |
| Protected Attributes inherited from tap::control::Subsystem | |
| Drivers * | drivers |
Detailed Description
Interface for a generic turret motor with a pitch and yaw motor.
Constructor & Destructor Documentation
◆ TurretSubsystemInterface()
|
inlineexplicit |
Member Function Documentation
◆ getCurrentPitchValue()
|
pure virtual |
- Returns
- The current physical pitch of the turret.
◆ getCurrentYawValue()
|
pure virtual |
- Returns
- The current value of the turret's physical yaw.
◆ getPitchAngleFromCenter()
|
pure virtual |
- Returns
- An angle between [-180, 180] that is the angle difference of the pitch's current value and the center value as defined by a subclass.
◆ getPitchSetpoint()
|
inlinepure virtual |
- See also
- getYawSetpoint
◆ getPitchVelocity()
|
inlinepure virtual |
- See also
- getYawVelocity
◆ getYawAngleFromCenter()
|
pure virtual |
- See also
- getPitchAngleFromCenter
◆ getYawSetpoint()
|
inlinepure virtual |
- Returns
- the desired yaw value value of whatever is being controlled.
◆ getYawVelocity()
|
inlinepure virtual |
- Returns
- the velocity of the turret's physical yaw motor(s)
◆ isOnline()
|
inlinepure virtual |
- Returns
trueif the turret is online (i.e.: is connected)
◆ setPitchMotorOutput()
|
pure virtual |
- See also
- setYawMotorOutput
◆ setPitchSetpoint()
|
pure virtual |
- See also
- setPitchSetpoint
◆ setYawMotorOutput()
|
pure virtual |
Sets yaw motor output. Limits the output based on the mechanical constraints of the turret.
◆ setYawSetpoint()
|
pure virtual |
Sets the desired yaw position of the turret.
- Parameters
-
[in] newValue the new desired value the turret will try and reach
◆ yawLimited()
|
pure virtual |
If false, the turret may spin 360 degrees freely, otherwise true.
The documentation for this class was generated from the following file:
- fang-mcb-project/taproot/src/tap/control/turret_subsystem_interface.hpp