#include <ref_serial.hpp>
Public Member Functions | |
| RefSerial (Drivers *drivers) | |
| mockable | ~RefSerial ()=default |
| void | messageReceiveCallback (const ReceivedSerialMessage &completeMessage) override |
| mockable bool | getRefSerialReceivingData () const |
| mockable const Rx::RobotData & | getRobotData () const |
| mockable const Rx::GameData & | getGameData () const |
| mockable RobotId | getRobotIdBasedOnCurrentRobotTeam (RobotId id) |
| mockable void | attachRobotToRobotMessageHandler (uint16_t msgId, RobotToRobotMessageHandler *handler) |
| mockable bool | acquireTransmissionSemaphore () |
| mockable void | releaseTransmissionSemaphore (uint32_t sentMsgLen) |
| bool | operatorBlinded () const |
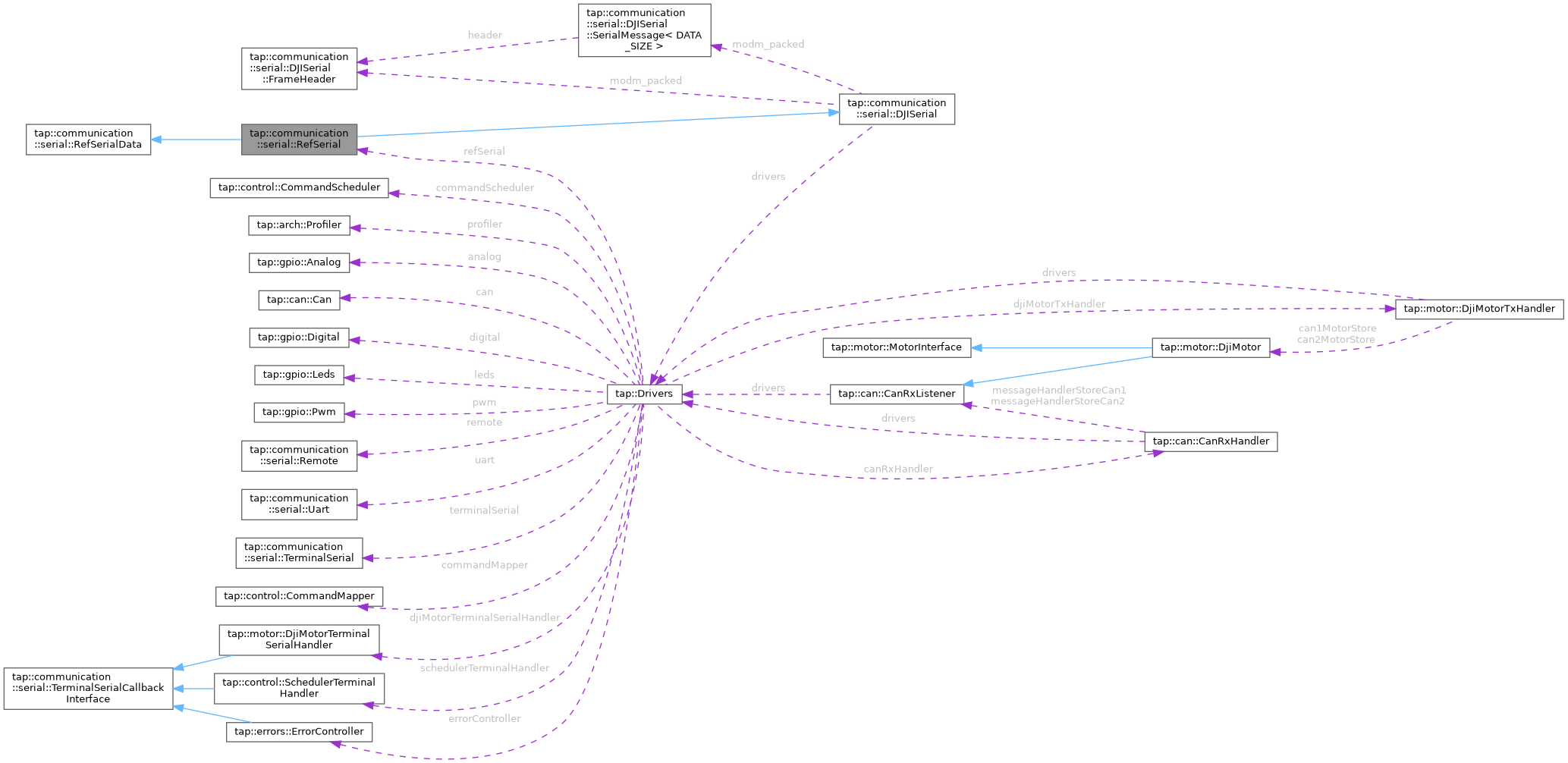
 Public Member Functions inherited from tap::communication::serial::DJISerial Public Member Functions inherited from tap::communication::serial::DJISerial | |
| DJISerial (Drivers *drivers, Uart::UartPort port, bool isRxCRCEnforcementEnabled=true) | |
| mockable | ~DJISerial ()=default |
| mockable void | initialize () |
| mockable void | updateSerial () |
Static Public Member Functions | |
| static bool | heatAndLimitValid (uint16_t heat, uint16_t heatLimit) |
| Static Public Member Functions inherited from tap::communication::serial::RefSerialData | |
| static bool | isBlueTeam (RobotId id) |
Additional Inherited Members | |
| Public Attributes inherited from tap::communication::serial::DJISerial | |
| struct tap::communication::serial::DJISerial::FrameHeader | modm_packed |
| struct tap::communication::serial::DJISerial::SerialMessage | modm_packed |
| Static Public Attributes inherited from tap::communication::serial::DJISerial | |
| static const uint16_t | SERIAL_RX_BUFF_SIZE = 1024 |
| static const uint16_t | SERIAL_HEAD_BYTE = 0xA5 |
| Protected Attributes inherited from tap::communication::serial::DJISerial | |
| Drivers * | drivers |
Detailed Description
A class designed to communicate with the 2021 version of the RoboMaster referee system. Supports decoding various referee serial message types. Also supports sending custom UI messages to the referee serial and sending custom robot to robot communication.
For information about the protocol that this serial parser/decoder uses, view RoboMaster's ref serial website: https://www.robomaster.com/en-US/products/components/referee (in the Document Download tab).
- Note
- use the instance stored in the
Driversto interact with this class (you shouldn't be declaring your ownRefSerialobject).
Receive information from the referee serial by continuously calling messageReceiveCallback. Access data sent by the referee serial by calling getRobotData or getGameData.
Member Enumeration Documentation
◆ MessageType
RX message type defines, referred to as "Command ID"s in the RoboMaster Ref System Protocol Appendix. Ignored message types commented out because they are not handled by this parser yet. They are values that are used in message headers to indicate the type of message we have received.
Current Ref Serial Version: 1.7.0 Updated March 2025.
Constructor & Destructor Documentation
◆ RefSerial()
| tap::communication::serial::RefSerial::RefSerial | ( | Drivers * | drivers | ) |
Constructs a RefSerial class connected to bound_ports::REF_SERIAL_UART_PORT with CRC enforcement enabled.
- See also
DjiSerial
◆ ~RefSerial()
|
default |
Member Function Documentation
◆ acquireTransmissionSemaphore()
|
inline |
Used by RefSerialTransmitter. Attempts to acquire transmission semaphore.
- Note
- should be called only using RF_WAIT_UNTIL to block until acquiring semaphore.
◆ attachRobotToRobotMessageHandler()
| void tap::communication::serial::RefSerial::attachRobotToRobotMessageHandler | ( | uint16_t | msgId, |
| RobotToRobotMessageHandler * | handler | ||
| ) |
◆ getGameData()
| const RefSerialData::Rx::GameData & tap::communication::serial::RefSerial::getGameData | ( | ) | const |
Returns a reference to the most up to date game data struct.
◆ getRefSerialReceivingData()
| bool tap::communication::serial::RefSerial::getRefSerialReceivingData | ( | ) | const |
◆ getRobotData()
| const RefSerialData::Rx::RobotData & tap::communication::serial::RefSerial::getRobotData | ( | ) | const |
Returns a reference to the most up to date robot data struct.
◆ getRobotIdBasedOnCurrentRobotTeam()
| RefSerial::RobotId tap::communication::serial::RefSerial::getRobotIdBasedOnCurrentRobotTeam | ( | RobotId | id | ) |
Returns a robot id that is of the same color of this robot's ID. This allows you to specify you want to send to one robot and then based on your team it will be sent to the correct robot (your team not the enemy team's robot).
◆ heatAndLimitValid()
|
inlinestatic |
- Returns
- True if the specified heat and heatLimit values are "valid". These values are valid if they aren't 0xffff and if the heatLimit is not 0.
◆ messageReceiveCallback()
|
overridevirtual |
Handles the types of messages defined above in the RX message handlers section.
Implements tap::communication::serial::DJISerial.
◆ operatorBlinded()
| bool tap::communication::serial::RefSerial::operatorBlinded | ( | ) | const |
- Returns
- True if the robot operator is blinded, false otherwise. Also return false if the referee system is offline.
◆ releaseTransmissionSemaphore()
|
inline |
The documentation for this class was generated from the following files:
- fang-mcb-project/taproot/src/tap/communication/serial/ref_serial.hpp
- fang-mcb-project/taproot/src/tap/communication/serial/ref_serial.cpp