Loading...
Searching...
No Matches
abstract_imu.hpp File Reference
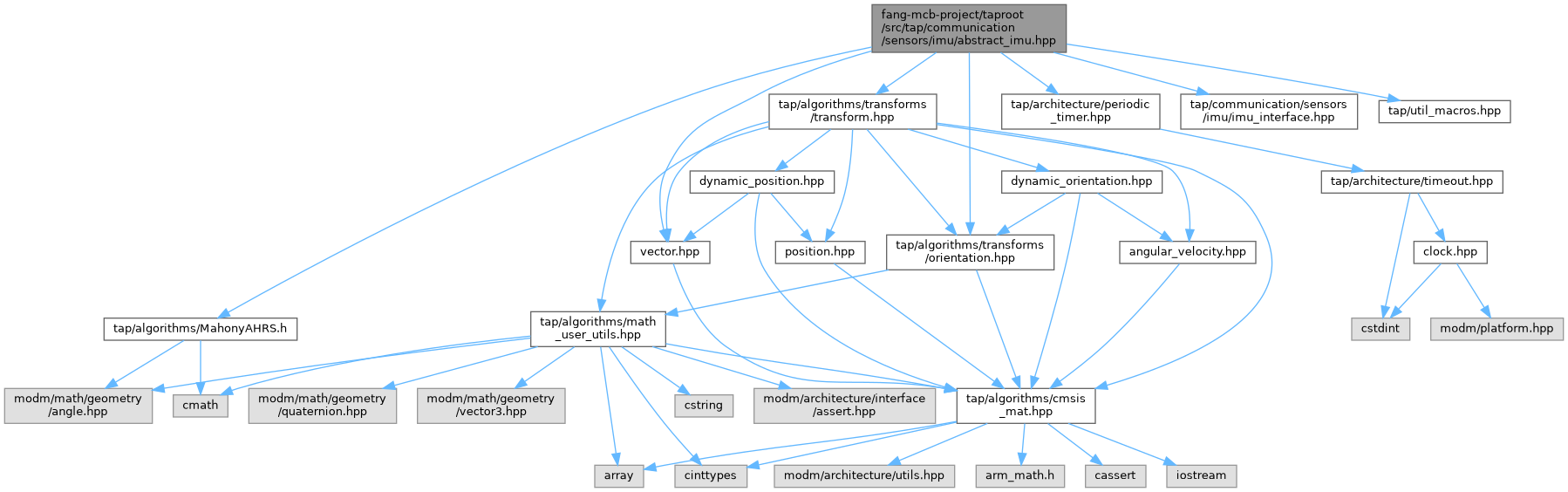
#include "tap/algorithms/MahonyAHRS.h"#include "tap/algorithms/transforms/orientation.hpp"#include "tap/algorithms/transforms/transform.hpp"#include "tap/algorithms/transforms/vector.hpp"#include "tap/architecture/periodic_timer.hpp"#include "tap/communication/sensors/imu/imu_interface.hpp"#include "tap/util_macros.hpp"
Include dependency graph for abstract_imu.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | tap::communication::sensors::imu::AbstractIMU |
| struct | tap::communication::sensors::imu::AbstractIMU::ImuData |
Namespaces | |
| namespace | tap |
| namespace | tap::communication |
| namespace | tap::communication::sensors |
| namespace | tap::communication::sensors::imu |
Variables | |
| constexpr float | tap::communication::sensors::imu::GRAVITY_MPS2 = 9.81f |