Loading...
Searching...
No Matches
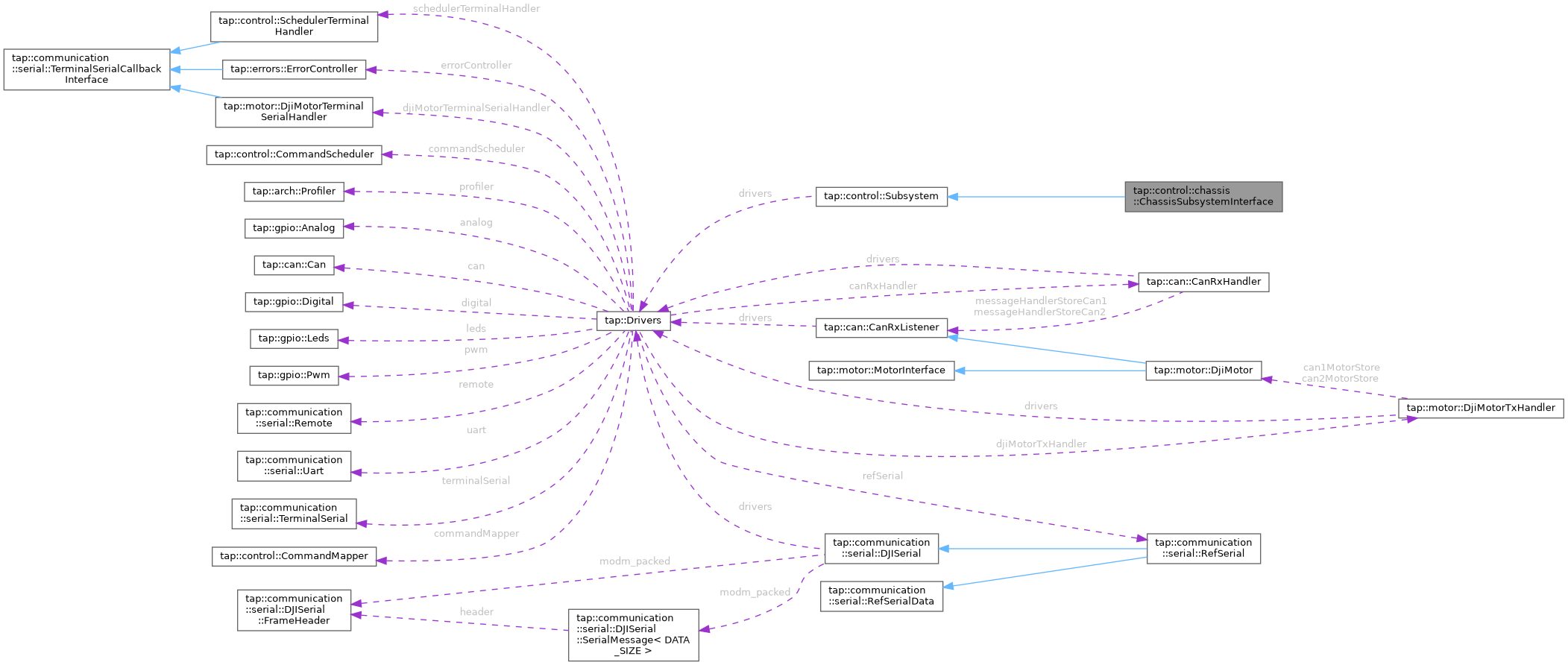
tap::control::chassis::ChassisSubsystemInterface Class Referenceabstract
Abstract interface for a robot chassis. More...
#include <chassis_subsystem_interface.hpp>
Inheritance diagram for tap::control::chassis::ChassisSubsystemInterface:
Collaboration diagram for tap::control::chassis::ChassisSubsystemInterface:
Public Member Functions | |
| ChassisSubsystemInterface (Drivers *drivers) | |
| virtual int | getNumChassisMotors () const =0 |
| virtual bool | allMotorsOnline () const =0 |
| virtual modm::Matrix< float, 3, 1 > | getActualVelocityChassisRelative () const =0 |
 Public Member Functions inherited from tap::control::Subsystem Public Member Functions inherited from tap::control::Subsystem | |
| Subsystem (Drivers *drivers) | |
| virtual | ~Subsystem () |
| virtual void | initialize () |
| void | registerAndInitialize () |
| mockable void | setDefaultCommand (Command *defaultCommand) |
| mockable Command * | getDefaultCommand () const |
| virtual void | refresh () |
| virtual void | refreshSafeDisconnect () |
| mockable void | setTestCommand (Command *testCommand) |
| mockable Command * | getTestCommand () const |
| virtual const char * | getName () const |
| mockable int | getGlobalIdentifier () const |
Static Public Member Functions | |
| static void | getVelocityWorldRelative (modm::Matrix< float, 3, 1 > &chassisRelativeVelocity, float chassisHeading) |
Additional Inherited Members | |
| Protected Attributes inherited from tap::control::Subsystem | |
| Drivers * | drivers |
Detailed Description
Abstract interface for a robot chassis.
Constructor & Destructor Documentation
◆ ChassisSubsystemInterface()
|
inline |
Member Function Documentation
◆ allMotorsOnline()
|
inlinepure virtual |
- Returns
trueiff all motors are online
◆ getActualVelocityChassisRelative()
|
pure virtual |
- Returns
- The actual chassis velocity in chassis relative frame, as a vector <vx, vy, vz>, where vz is rotational velocity. This is the velocity calculated from the chassis's encoders. Units: m/s
◆ getNumChassisMotors()
|
inlinepure virtual |
- Returns
- the number of chassis motors
◆ getVelocityWorldRelative()
|
inlinestatic |
Transforms the chassis relative velocity of the form <vx, vy, vz> (where z is an orientation) into world relative frame, given some particular chassis heading (z direction, assumed to be in radians). Transforms the input matrix chassisRelativeVelocity. Units: m/s
The documentation for this class was generated from the following file:
- fang-mcb-project/taproot/src/tap/control/chassis/chassis_subsystem_interface.hpp