Loading...
Searching...
No Matches
tap::control::PressCommandMapping Class Reference
#include <press_command_mapping.hpp>
Inheritance diagram for tap::control::PressCommandMapping:
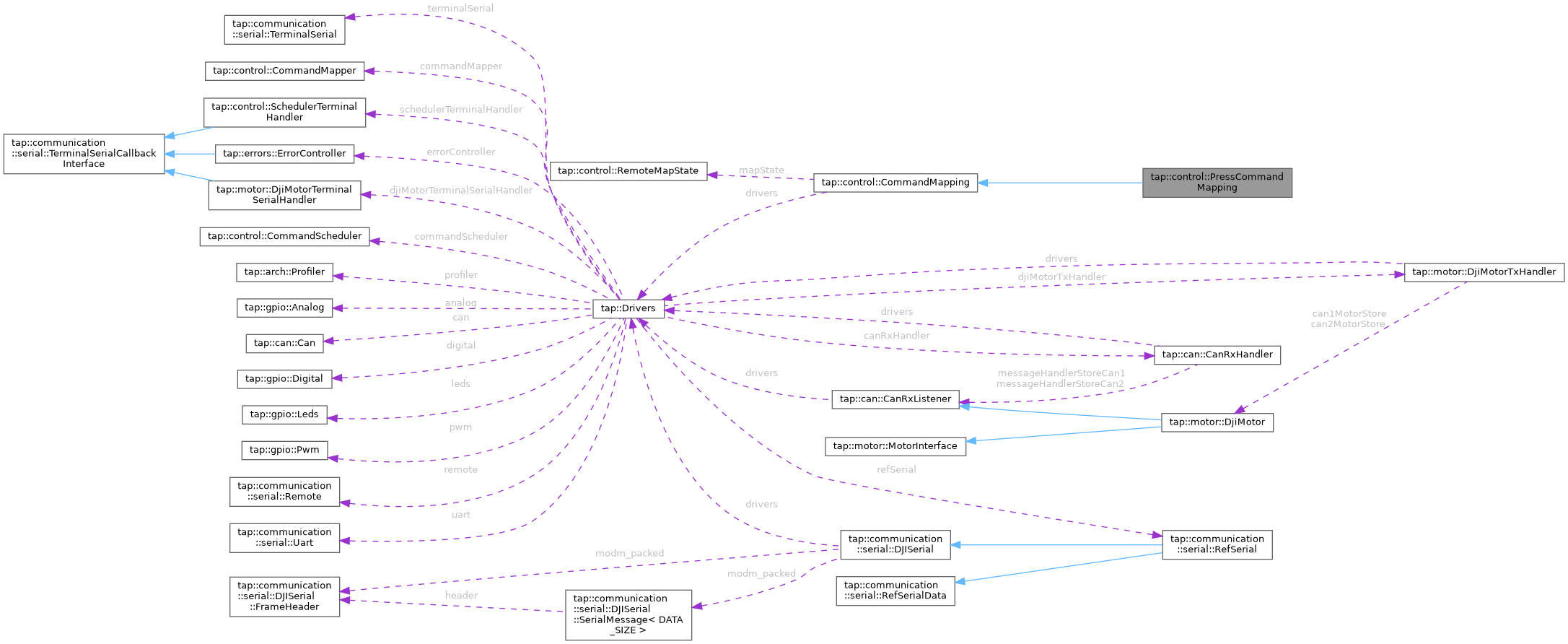
Collaboration diagram for tap::control::PressCommandMapping:
Public Member Functions | |
| PressCommandMapping (Drivers *drivers, const std::vector< Command * > cmds, const RemoteMapState &rms) | |
| ~PressCommandMapping () override=default | |
| void | executeCommandMapping (const RemoteMapState &currState) override |
 Public Member Functions inherited from tap::control::CommandMapping Public Member Functions inherited from tap::control::CommandMapping | |
| CommandMapping (Drivers *drivers, const std::vector< Command * > cmds, const RemoteMapState &rms) | |
| virtual | ~CommandMapping ()=default |
| virtual bool | mappingSubset (const RemoteMapState &mapState) |
| const RemoteMapState & | getAssociatedRemoteMapState () const |
| const std::vector< Command * > & | getAssociatedCommands () const |
Additional Inherited Members | |
| Static Public Member Functions inherited from tap::control::CommandMapping | |
| static bool | negKeysSubset (const RemoteMapState &state1, const RemoteMapState &state2) |
| Protected Member Functions inherited from tap::control::CommandMapping | |
| void | addCommands () |
| void | removeCommands () |
| bool | noCommandsScheduled () const |
| Protected Attributes inherited from tap::control::CommandMapping | |
| const RemoteMapState | mapState |
| std::vector< Command * > | mappedCommands |
| Drivers * | drivers |
Detailed Description
A CommandMapping that adds Commands when the contained mapping is a subset of the remote mapping. The Command is not removed by the CommandMapping. Instead, the mapping will be removed when the Command is finished.
Constructor & Destructor Documentation
◆ PressCommandMapping()
|
inline |
Constructor must take the set of Commands and the RemoteMapState.
◆ ~PressCommandMapping()
|
overridedefault |
Default destructor.
Member Function Documentation
◆ executeCommandMapping()
|
overridevirtual |
Using currState, determines whether or not to add or remove Commands from the main scheduler. Up the the implementer to determine what the criteria for adding and removing Commands should be.
- Parameters
-
[in] currState The current state of the remote.
Implements tap::control::CommandMapping.
The documentation for this class was generated from the following files:
- fang-mcb-project/taproot/src/tap/control/press_command_mapping.hpp
- fang-mcb-project/taproot/src/tap/control/press_command_mapping.cpp