#include <base_quad_drive.hpp>
Public Types | |
| using | Motor = motor::ISpeedMotor |
| using | Motors = QuadCollection< std::unique_ptr< Motor > > |
Additional Inherited Members | |
 Protected Attributes inherited from tap::control::Subsystem Protected Attributes inherited from tap::control::Subsystem | |
| Drivers * | drivers |
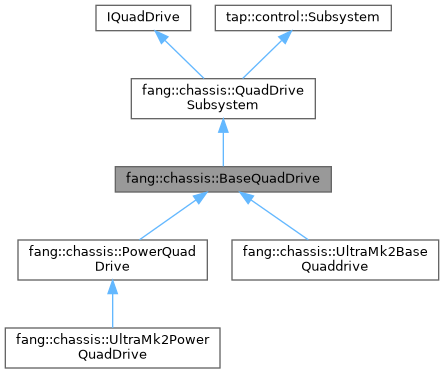
Detailed Description
This provides control for a set of 4 ISpeedMotors It manages the initialization and update functionality as well.
This is often passed into a holonomic drive or tank drive to delegate managing the wheel speeds and updating each of the motors
This can be managed by a taproot command (can be registered).
Member Typedef Documentation
◆ Motor
◆ Motors
| using fang::chassis::BaseQuadDrive::Motors = QuadCollection<std::unique_ptr<Motor> > |
Constructor & Destructor Documentation
◆ BaseQuadDrive() [1/2]
| fang::chassis::BaseQuadDrive::BaseQuadDrive | ( | Drivers & | drivers, |
| std::unique_ptr< Motor > | frontLeftMotor, | ||
| std::unique_ptr< Motor > | frontRightMotor, | ||
| std::unique_ptr< Motor > | rearLeftMotor, | ||
| std::unique_ptr< Motor > | rearRightMotor | ||
| ) |
◆ BaseQuadDrive() [2/2]
Motors should be passed explicitly with move semantics to prevent memory errors. If you are unfamiliar with r-value references, since they have no name, they pop into existence the moment they are stated then pop out. This means that we do not have to worry about motors continuing to hold unto. If motors must be a named variable, cast it to an r-value reference with std::move()
◆ ~BaseQuadDrive()
|
inlinevirtual |
Member Function Documentation
◆ initialize()
|
overridevirtual |
Called once when you add the Subsystem to the commandScheduler stored in the Drivers class.
Reimplemented from tap::control::Subsystem.
Reimplemented in fang::chassis::PowerQuadDrive.
◆ refresh()
|
overridevirtual |
Called in the scheduler's run function assuming this command has been registered with the scheduler. This function should contain code that must be periodically updated and is generic to the subsystem (i.e. updating a control loop generic to this subsystem). This function should not contain command specific control code. When you create a subclass of Subsystem, you should overwrite this virtual function.
Must be virtual otherwise scheduler will refer to this function rather than looking in child for this function.
Reimplemented from tap::control::Subsystem.
Reimplemented in fang::chassis::PowerQuadDrive.
◆ setTargetWheelSpeeds()
|
overridevirtual |
Reimplemented in fang::chassis::PowerQuadDrive.
◆ update()
|
overridevirtual |
Reimplemented in fang::chassis::PowerQuadDrive.
The documentation for this class was generated from the following files:
- fang-mcb-project/src/control/chassis/drive/quad_drive/base_quad_drive/base_quad_drive.hpp
- fang-mcb-project/src/control/chassis/drive/quad_drive/base_quad_drive/base_quad_drive.cpp