Loading...
Searching...
No Matches
dji_motor_aliases.hpp File Reference
#include "rail/motor/ioutput_motor.hpp"#include "wrap/trap/algorithms/smooth_pid.hpp"#include "wrap/units/units_alias.hpp"#include <cstdint>
Include dependency graph for dji_motor_aliases.hpp:

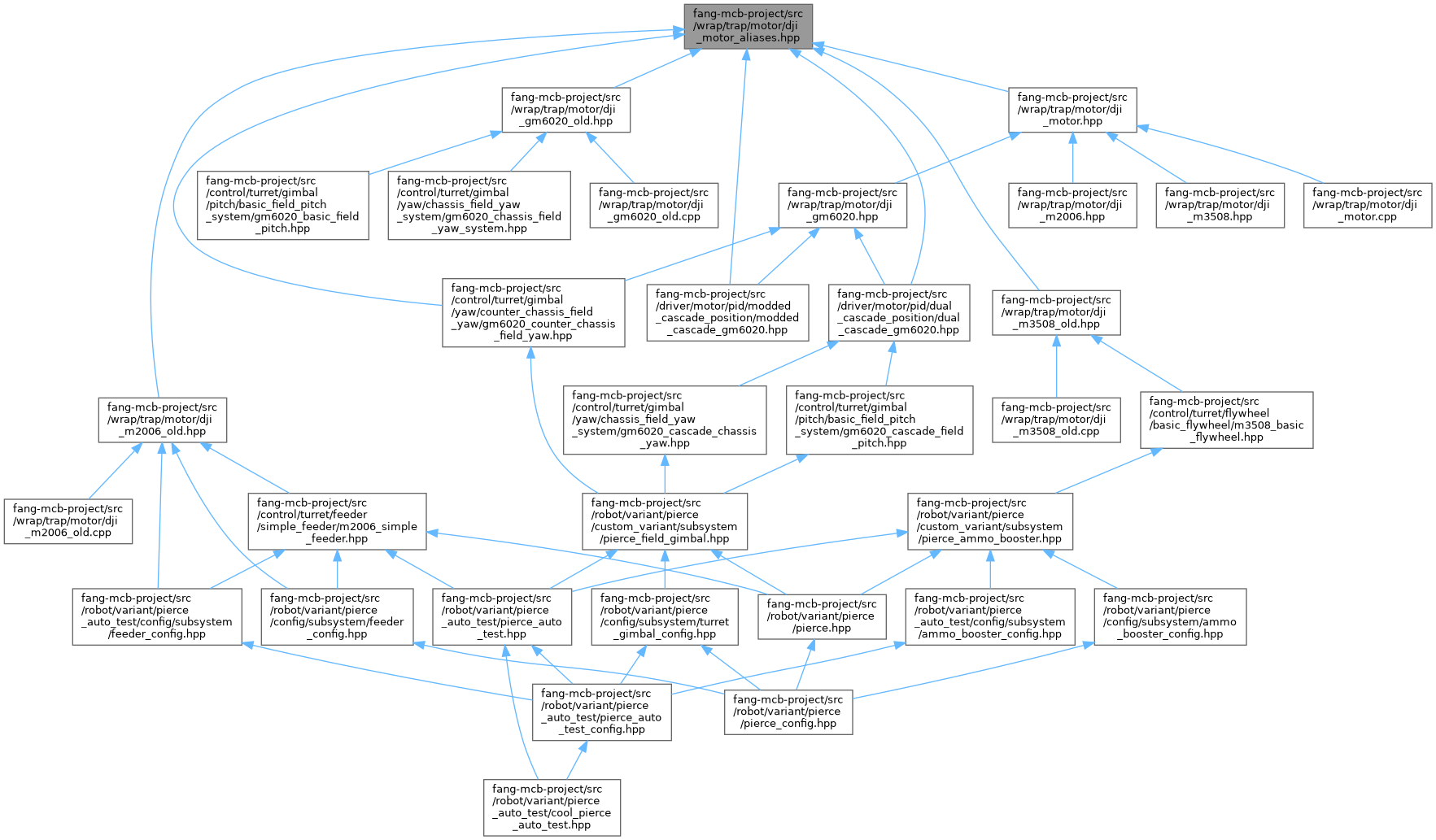
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | trap |
| namespace | trap::motor |
Typedefs | |
| using | trap::motor::DjiMotorOutput = int16_t |
| using | trap::motor::DjiSpeedPid = trap::algorithms::SmoothPid< RPM, DjiMotorOutput, Seconds > |
| using | trap::motor::DjiPositionPid = trap::algorithms::SmoothPid< Radians, DjiMotorOutput, Seconds > |
| using | trap::motor::IDjiOutputMotor = rail::motor::IOutputMotor< DjiMotorOutput > |