Loading...
Searching...
No Matches
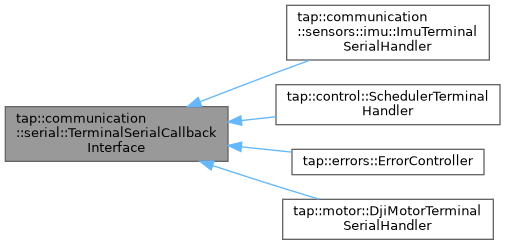
tap::communication::serial::TerminalSerialCallbackInterface Class Referenceabstract
#include <terminal_serial.hpp>
Inheritance diagram for tap::communication::serial::TerminalSerialCallbackInterface:
Public Member Functions | |
| virtual bool | terminalSerialCallback (char *inputLine, modm::IOStream &outputStream, bool streamingEnabled)=0 |
| virtual void | terminalSerialStreamCallback (modm::IOStream &outputStream)=0 |
Detailed Description
If you would like to interact with the terminal, extend this class and implement the callback.
Member Function Documentation
◆ terminalSerialCallback()
|
pure virtual |
- Parameters
-
[in] inputLine The user input to be processed. [out] outputStream The stream to write information to. [in] streamingEnabled Set to truewhen the streaming is initially enabled. Subsequent interactions with the callback handler will be via terminalSerialStreamCallback until streaming has been disabled.
- Returns
trueif the inputLine was valid and was parsed correctly,falseotherwise.
Implemented in tap::communication::sensors::imu::ImuTerminalSerialHandler, tap::control::SchedulerTerminalHandler, tap::motor::DjiMotorTerminalSerialHandler, and tap::errors::ErrorController.
◆ terminalSerialStreamCallback()
|
pure virtual |
Called repeatedly by the TerminalSerial when in streaming mode.
Implemented in tap::errors::ErrorController, tap::communication::sensors::imu::ImuTerminalSerialHandler, tap::control::SchedulerTerminalHandler, and tap::motor::DjiMotorTerminalSerialHandler.
The documentation for this class was generated from the following file:
- fang-mcb-project/taproot/src/tap/communication/serial/terminal_serial.hpp