Loading...
Searching...
No Matches
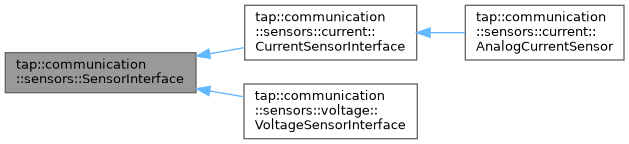
tap::communication::sensors::SensorInterface Class Referenceabstract
#include <sensor_interface.hpp>
Inheritance diagram for tap::communication::sensors::SensorInterface:
Public Member Functions | |
| virtual void | update ()=0 |
Detailed Description
Interface for generic sensor that requires a periodic update.
This interface may be used in conjunction with a sensor scheduler (see #132).
Member Function Documentation
◆ update()
|
pure virtual |
Function that one implements that reads data from the sensor and performs any filtering as required.
Implemented in tap::communication::sensors::current::AnalogCurrentSensor.
The documentation for this class was generated from the following file:
- fang-mcb-project/taproot/src/tap/communication/sensors/sensor_interface.hpp