#include <wrapped_encoder.hpp>
Public Member Functions | |
| WrappedEncoder (bool isInverted, uint32_t encoderResolution, float gearRatio=1, uint32_t encoderHomePosition=0) | |
| void | initialize () override |
| tap::algorithms::WrappedFloat | getPosition () const override |
| mockable tap::algorithms::WrappedFloat | getEncoder () const |
| float | getVelocity () const override |
| void | alignWith (EncoderInterface *other) override |
| void | resetEncoderValue () override |
 Public Member Functions inherited from tap::encoder::EncoderInterface Public Member Functions inherited from tap::encoder::EncoderInterface | |
| virtual bool | isOnline () const =0 |
Protected Member Functions | |
| void | updateEncoderValue (uint32_t encoderActual) |
Protected Attributes | |
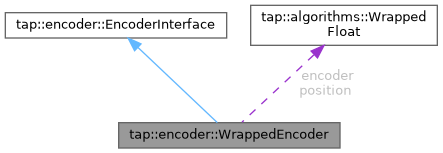
| tap::algorithms::WrappedFloat | encoder |
| tap::algorithms::WrappedFloat | position |
| bool | inverted |
| const uint32_t | encoderResolution |
| const float | gearRatio |
Detailed Description
Represents an encoder that reports its values as a wrapped number of ticks.
Constructor & Destructor Documentation
◆ WrappedEncoder()
| tap::encoder::WrappedEncoder::WrappedEncoder | ( | bool | isInverted, |
| uint32_t | encoderResolution, | ||
| float | gearRatio = 1, |
||
| uint32_t | encoderHomePosition = 0 |
||
| ) |
- Parameters
-
isInverted if falsethe positive rotation direction of the shaft is counter-clockwise when looking at the shaft from. Iftruethen the positive rotation direction will be clockwise.encoderResolution the number of encoder ticks before the value wraps. gearRatio the ratio of input revolutions over output revolutions of this encoder. encoderHomePosition the zero position for the encoder in encoder ticks.
Member Function Documentation
◆ alignWith()
|
overridevirtual |
Aligns this encoder to another encoder so that their positions are equal. If the two encoders are mechanically linked, they would then continue to report the same position.
Implements tap::encoder::EncoderInterface.
◆ getEncoder()
|
inline |
Gets the raw encoder position.
◆ getPosition()
|
overridevirtual |
Gets the current position of the encoder, in a wrapped float on the range [0, M_TWOPI)
Implements tap::encoder::EncoderInterface.
◆ getVelocity()
|
overridevirtual |
Gets the current velocity reported by the encoder. Returned in a value of radians / second
Implements tap::encoder::EncoderInterface.
◆ initialize()
|
inlineoverridevirtual |
Initialize the encoder. For instance: attaching a can receiver.
Implements tap::encoder::EncoderInterface.
◆ resetEncoderValue()
|
overridevirtual |
Zeros the encoder to its current position. All encoder positions will be based from this position.
Implements tap::encoder::EncoderInterface.
◆ updateEncoderValue()
|
protected |
Updates the stored encoder value given a newly received encoder value special logic necessary for keeping track of unwrapped encoder value.
Member Data Documentation
◆ encoder
|
protected |
The current encoder position.
◆ encoderResolution
|
protected |
◆ gearRatio
|
protected |
◆ inverted
|
protected |
◆ position
|
protected |
The encoder position converted into output rotations
The documentation for this class was generated from the following files:
- fang-mcb-project/taproot/src/tap/communication/sensors/encoder/wrapped_encoder.hpp
- fang-mcb-project/taproot/src/tap/communication/sensors/encoder/wrapped_encoder.cpp