Loading...
Searching...
No Matches
fang::chassis::M3508PowerQuadDrive Class Reference
#include <m3508_power_quad_drive.hpp>
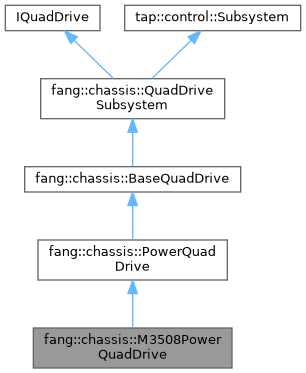
Inheritance diagram for fang::chassis::M3508PowerQuadDrive:
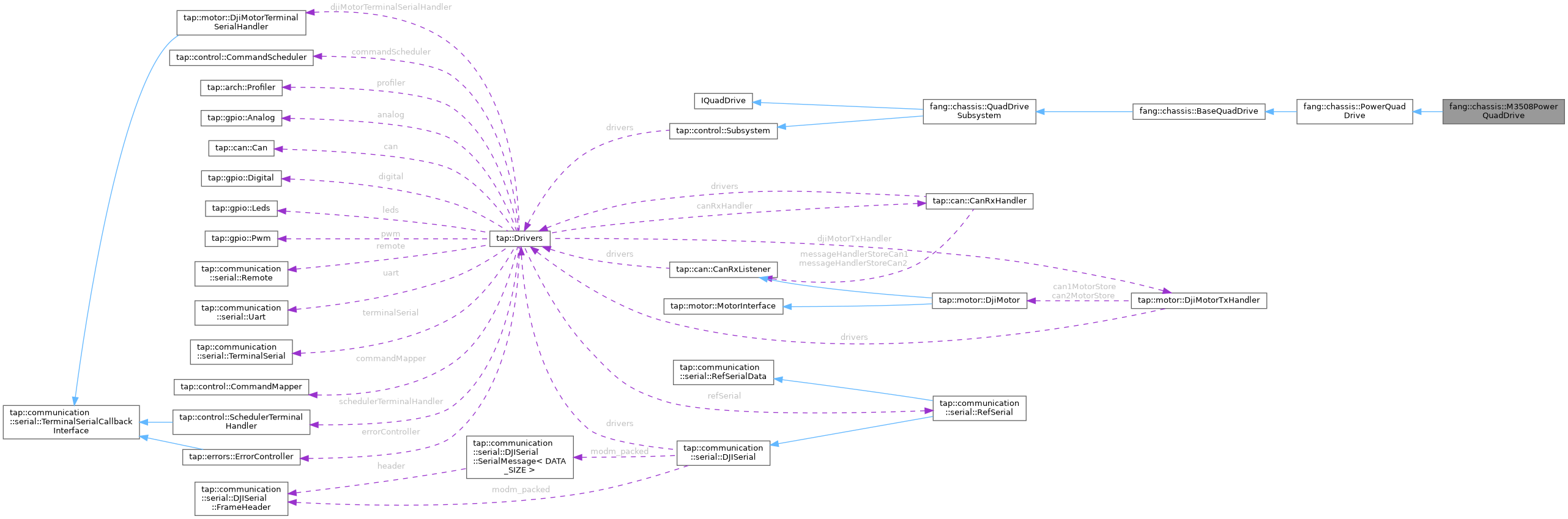
Collaboration diagram for fang::chassis::M3508PowerQuadDrive:
Public Types | |
| using | Motor = trap::motor::DjiM3508Old |
| using | Config = QuadCollection< Motor::Config > |
 Public Types inherited from fang::chassis::BaseQuadDrive Public Types inherited from fang::chassis::BaseQuadDrive | |
| using | Motor = motor::ISpeedMotor |
| using | Motors = QuadCollection< std::unique_ptr< Motor > > |
Public Member Functions | |
| M3508PowerQuadDrive (Drivers &drivers, std::unique_ptr< IPowerLimiterSystem > powerLimiter, const Config &config) | |
| Public Member Functions inherited from fang::chassis::PowerQuadDrive | |
| PowerQuadDrive (Drivers &drivers, Motors &&motors, std::unique_ptr< IPowerLimiterSystem > powerLimiter) | |
| virtual void | setTargetWheelSpeeds (const QuadRPM &wheelSpeeds) override |
| virtual void | initialize () override |
| virtual void | update () override |
| virtual void | refresh () override |
| virtual | ~PowerQuadDrive () |
| Public Member Functions inherited from fang::chassis::BaseQuadDrive | |
| BaseQuadDrive (Drivers &drivers, std::unique_ptr< Motor > frontLeftMotor, std::unique_ptr< Motor > frontRightMotor, std::unique_ptr< Motor > rearLeftMotor, std::unique_ptr< Motor > rearRightMotor) | |
| BaseQuadDrive (Drivers &drivers, Motors &&motors) | |
| virtual | ~BaseQuadDrive () |
| Public Member Functions inherited from fang::chassis::QuadDriveSubsystem | |
| QuadDriveSubsystem (tap::Drivers &drivers) | |
| virtual | ~QuadDriveSubsystem ()=default |
| Public Member Functions inherited from tap::control::Subsystem | |
| Subsystem (Drivers *drivers) | |
| virtual | ~Subsystem () |
| void | registerAndInitialize () |
| mockable void | setDefaultCommand (Command *defaultCommand) |
| mockable Command * | getDefaultCommand () const |
| virtual void | refreshSafeDisconnect () |
| mockable void | setTestCommand (Command *testCommand) |
| mockable Command * | getTestCommand () const |
| virtual const char * | getName () const |
| mockable int | getGlobalIdentifier () const |
Additional Inherited Members | |
| Protected Attributes inherited from tap::control::Subsystem | |
| Drivers * | drivers |
Member Typedef Documentation
◆ Config
◆ Motor
Constructor & Destructor Documentation
◆ M3508PowerQuadDrive()
|
inline |
You can pass your custom power limiter into this class!
The documentation for this class was generated from the following file:
- fang-mcb-project/src/control/chassis/drive/quad_drive/power_quad_drive/m3508_power_quad_drive.hpp