Loading...
Searching...
No Matches
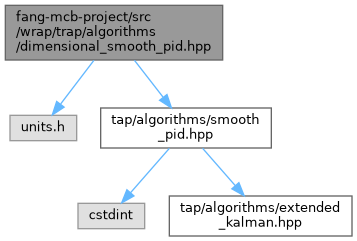
dimensional_smooth_pid.hpp File Reference
Include dependency graph for dimensional_smooth_pid.hpp:
Go to the source code of this file.
Classes | |
| class | trap::algorithms::DimensionalSmoothPid< RawControlUnit, RawErrorUnit, RawTimeUnit > |
| struct | trap::algorithms::DimensionalSmoothPid< RawControlUnit, RawErrorUnit, RawTimeUnit >::Config |
Namespaces | |
| namespace | trap |
| namespace | trap::algorithms |
Functions | |
| Config (double p, double i, double d, double maxIntegralAccumulation, double maxOutput, double errorDerivativeFloor, double errorDeadzone=0.0, double tQDerivativeKalman=1.0, double tRDerivativeKalman=0.0, tRProportionalKalman=1.0) | |
Variables | |
| PUnit | p |
| IUnit | i |
| DUnit | d |
| IntegralAccumulationUnit | maxIntegralAccumulation |
| ControlUnit | maxOutput |
| ErrorUnit | errorDerivativeFloor |
| ErrorUnit | errorDeadzone = ErrorUnit{0.0} |
| float | tQDerivativeKalman = 1.0f |
| float | tRDerivativeKalman = 0.0f |
| float | tQProportionalKalman = 1.0f |
| float | tRProportionalKalman = 0.0f |
Function Documentation
◆ Config()
| DimensionalSmoothPid::Config | ( | double | p, |
| double | i, | ||
| double | d, | ||
| double | maxIntegralAccumulation, | ||
| double | maxOutput, | ||
| double | errorDerivativeFloor, | ||
| double | errorDeadzone = 0.0, |
||
| double | tQDerivativeKalman = 1.0, |
||
| double | tRDerivativeKalman = 0.0, |
||
| tRProportionalKalman | = 1.0 |
||
| ) |
Mercy constructor
Variable Documentation
◆ d
| DUnit d |
◆ errorDeadzone
| ErrorUnit errorDeadzone = ErrorUnit{0.0} |
◆ errorDerivativeFloor
| ErrorUnit errorDerivativeFloor |
◆ i
| IUnit i |
◆ maxIntegralAccumulation
| IntegralAccumulationUnit maxIntegralAccumulation |
◆ maxOutput
| ControlUnit maxOutput |
◆ p
| PUnit p |
◆ tQDerivativeKalman
| float tQDerivativeKalman = 1.0f |
◆ tQProportionalKalman
| float tQProportionalKalman = 1.0f |
◆ tRDerivativeKalman
| float tRDerivativeKalman = 0.0f |
◆ tRProportionalKalman
| float tRProportionalKalman = 0.0f |