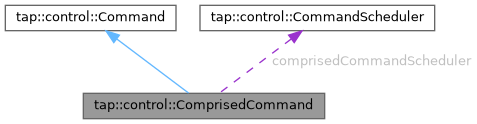
A class with all the features of a Command but with the addition of a CommandScheduler that can be used to schedule multiple Commands inside a single Command. If you are making a comprised command, operations in this Command should operate at a high level. In essence, a comprised acts as a vessel for a state machine that when it wants to change the state of the robot, it adds/removes commands to its command scheduler instead of directly interacting with a subsystem.
For example, consider this use case: You have a Command that actuates a piston to grab something and another Command that flips a wrist that has the piston out. It would be nice to reuse these Commands and make a Command that flips the wrist out and then actuates the piston in quick succession. To do so, you can create a ComprisedCommand that consists of the two Commands described above. In this ComprisedCommand, first schedule the Command that flips the wrist out, then when that Command is done, schedule the Command that actuates the piston.
When you are using this the comprisedCommandScheduler, be sure to register Subsystems and add Subsystem dependencies for the Commands that will be added to the scheduler.

 Public Member Functions inherited from tap::control::Command
Public Member Functions inherited from tap::control::Command